设计模式:简单工厂、工厂方法、抽象工厂之小结与区别
简单工厂,工厂方法,抽象工厂都属于设计模式中的创建型模式。其主要功能都是帮助我们把对象的实例化部分抽取了出来,优化了系统的架构,并且增强了系统的扩展性。
本文是本人对这三种模式学习后的一个小结以及对他们之间的区别的理解。
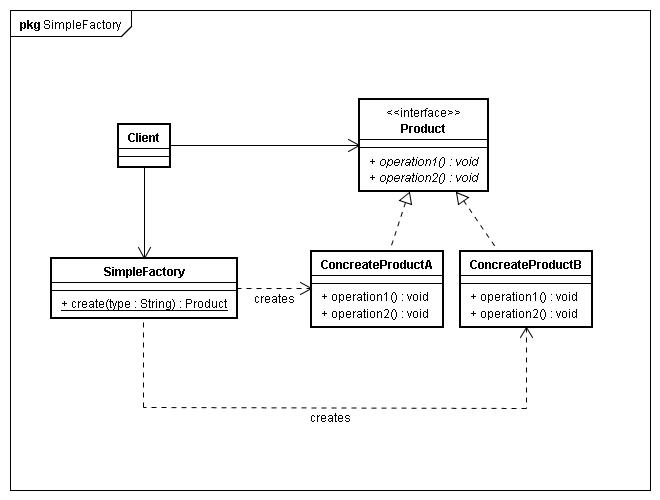
简单工厂
简单工厂模式的工厂类一般是使用静态方法,通过接收的参数的不同来返回不同的对象实例。
不修改代码的话,是无法扩展的。
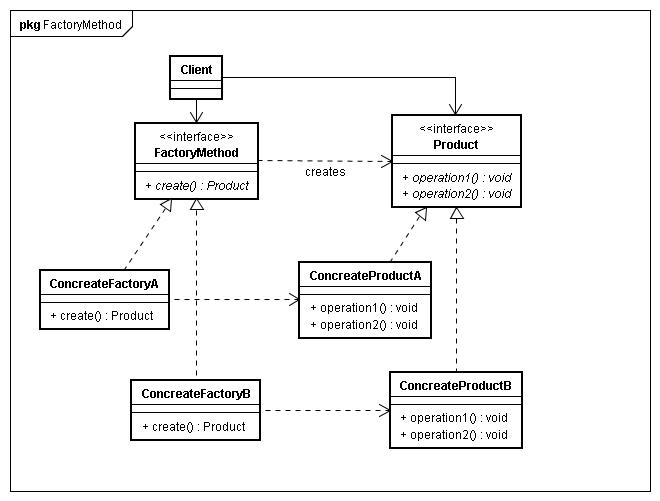
工厂方法
工厂方法是针对每一种产品提供一个工厂类。通过不同的工厂实例来创建不同的产品实例。
在同一等级结构中,支持增加任意产品。
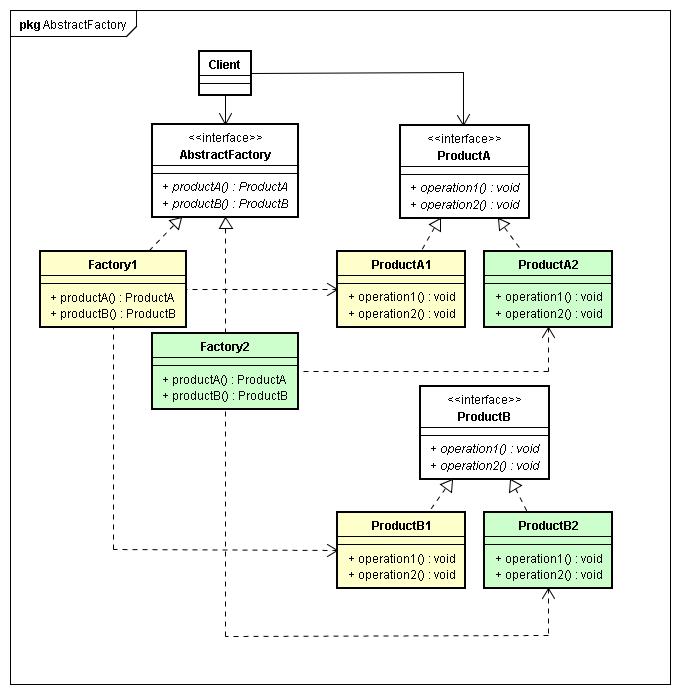
抽象工厂
抽象工厂是应对产品族概念的。比如说,每个汽车公司可能要同时生产轿车,货车,客车,那么每一个工厂都要有创建轿车,货车和客车的方法。
应对产品族概念而生,增加新的产品线很容易,但是无法增加新的产品。
小结
★工厂模式中,重要的是工厂类,而不是产品类。产品类可以是多种形式,多层继承或者是单个类都是可以的。但要明确的,工厂模式的接口只会返回一种类型的实例,这是在设计产品类的时候需要注意的,最好是有父类或者共同实现的接口。
★使用工厂模式,返回的实例一定是工厂创建的,而不是从其他对象中获取的。
★工厂模式返回的实例可以不是新创建的,返回由工厂创建好的实例也是可以的。
区别
简单工厂 : 用来生产同一等级结构中的任意产品。(对于增加新的产品,无能为力)
工厂方法 :用来生产同一等级结构中的固定产品。(支持增加任意产品)
抽象工厂 :用来生产不同产品族的全部产品。(对于增加新的产品,无能为力;支持增加产品族)
以上三种工厂 方法在等级结构和产品族这两个方向上的支持程度不同。所以要根据情况考虑应该使用哪种方法。
//from: http://blog.csdn.net/superbeck/article/details/4446177
更多相关:
-
简介 抽象工厂模式(Abstract Factory Pattern):提供一个创建一系列相关或相互依赖对象的接口,而无须指定它们具体的类。抽象工厂模式又称为Kit模式,属于对象创建型模式。 不同点 为了更清晰地理解抽象工厂模式,需要先引入两个概念:产品等级结构 :产品等级结构即产品的继承结构,如一个抽象类是CPU,其子类有intel...
-
工厂方法模式: 一个抽象产品类,可以派生出多个具体产品类。 一个抽象工厂类,可以派生出多个具体工厂类。 每个具体工厂类只能创建一个具体产品类的实例。 抽象工厂模式: 多个抽象产品类,每个抽象产品类可以派生出多个具体产品类。 一个抽象工厂类,可以派生出多个具体工厂类。 每个具体工厂类可以创建多个具体产品类的实例。 区别:...
-
又重头想了一下还是以配电脑为例最开始的时候,需要电脑,你得自己去生产电脑的每一个组件,例如你要cpu 就得自己生产cpu 要主板就得自己生产主板。于是出现 简单工厂模式在简单工厂模式中,定义一个返回接口,然后所有的组件实例都从这个工厂中产生例: 工厂---------生产硬件 硬件----------...
-
产品相关知识可以在:http://www.aipingce.com/进行学习,本文转自:http://www.aipingce.com/article-22960-1.html 首先,我个人还是非常推荐大家看实体书的,原因如下,算是做个分析吧: 电子书是免费的,我也分享了很多,可以放在电脑、手机、pad上面看,但是通过我自己的体会...
-
产品经理跪求程序员,程序员跪求程序成功上线! 前几天纯银V在微博上发了一条微博「很多人吐槽“人人都是产品经理”这句话,其实在我看来,这句话的正确理解是“人人都应该学习产品经理的思维方式,来提升自己的专业能力”,不知道作者是否本意如此。当然,实际上它容易被理解为“我也可以做产品经理,创造一个伟大的产品”,那就很扯淡了。尤其水货产...
-
《程序员杂志》的文章,原帖位于http://www.programmer.com.cn/7760/ 写的很好,自己转贴存储一下,也符合Product Owner的要求,就是……要求太高了! 本文是他回顾自己二十多年来从事软件产品管理工作的总结和经验分享,谈到了招聘产品经理的标准,以及产品经理应该具备的特质。文 / Marty Caga...
-
来源:公众号|计算机视觉工坊(系投稿)作者:仲夏夜之星「3D视觉工坊」技术交流群已经成立,目前大约有12000人,方向主要涉及3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、学术交流、...
-
点云PCL免费知识星球,点云论文速读。文章:Real-Time LIDAR-Based Urban Road and Sidewalk Detection for Autonomous Vehicles作者:Ern˝o Horváth , Claudiu Pozna ,and Miklós Unger编译:点云PCL代码:http...
-
文章:Semantic Histogram Based Graph Matching for Real-Time Multi-Robot Global Localization in Large Scale Environment作者:Xiyue Guo, Junjie Hu, Junfeng Chen, Fuqin Deng, T...
-
点云PCL免费知识星球,点云论文速读。文章:Robust Place Recognition using an Imaging Lidar作者:Tixiao Shan, Brendan Englot, Fabio Duarte, Carlo Ratti, and Daniela Rus编译:点云PCL(ICRA 2021)开源代码:...
-
文章:A Survey of Calibration Methods for Optical See-Through Head-Mounted Displays作者:Jens Grubert , Yuta Itoh, Kenneth Moser编译:点云PCL本文仅做学术分享,如有侵权,请联系删除。欢迎各位加入免费知识星球,获取PD...