DSP-SLAM:具有深度形状先验的面向对象SLAM
点云PCL免费知识星球,点云论文速读。
文章:DSP-SLAM: Object Oriented SLAM with Deep Shape Priors
作者:Jingwen Wang Martin Runz Lourdes Agapito
编译:点云PCL
代码:https://github.com/JingwenWang95/DSP-SLAM
欢迎各位加入免费知识星球,获取PDF论文,欢迎转发朋友圈。文章仅做学术分享,如有侵权联系删文。未经博主同意请勿擅自转载。
论文阅读模块将分享点云处理,SLAM,三维视觉,高精地图相关的文章。公众号致力于理解三维视觉领域相关内容的干货分享,欢迎各位加入我,我们一起每天一篇文章阅读,开启分享之旅,有兴趣的可联系微信[email protected]。
摘要
本文提出了DSP-SLAM,这是一个面向对象的SLAM系统,它为前景对象构建了一个丰富而精确的稠密3D模型的联合地图,并用稀疏的地标点来表示背景环境。DSP-SLAM将基于特征的SLAM系统重建的三维点云作为输入,并使其具备通过稠密重建检测对象来增强其稀疏地图的能力。通过语义实例分割检测目标,并通过一种新的二阶优化算法,以特定类别的深度形状嵌入作为先验估计目标的形状和姿态。我们的对象感知捆集调整构建姿势图,以联合优化相机姿势、对象位置和特征点。DSP-SLAM可以在3种不同的输入模式下以每秒10帧的速度工作:单目、立双目或双目+激光雷达。
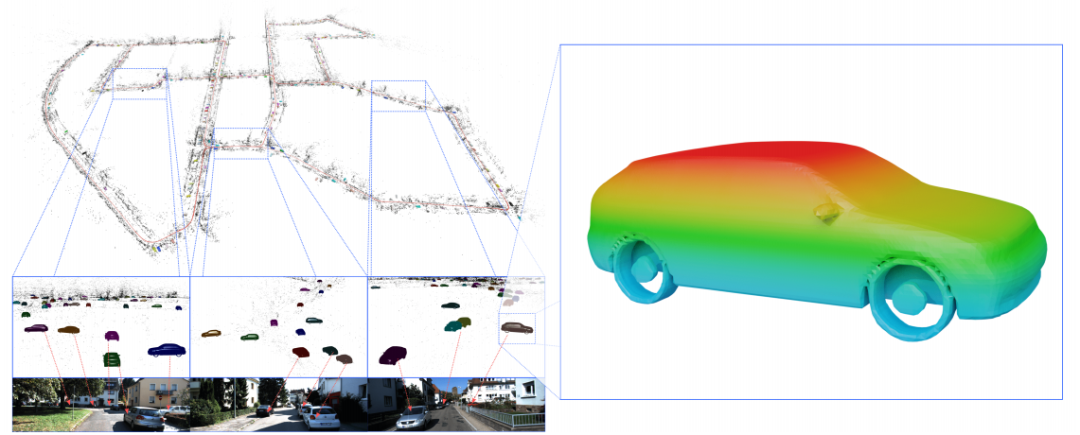
DSP-SLAM构建了丰富的对象感知地图,提供了检测到的对象的完整详细形状,同时粗略地将背景表示为稀疏特征点,此图为在KITTI 00上重建的稀疏地图和相机轨迹
视频演示了DSP-SLAM在Friburg和Redwood OS数据集的单目RGB序列和KITTI里程计数据集的stereo+LiDAR序列上以几乎帧速率运行,表明它实现了高质量的全对象重建,即使是部分观测,同时保持了一致的全局地图。我们的评估显示,与最近基于深度先验的重建方法相比,物体姿态和形状重建有了改进,并减少了KITTI数据集上的相机跟踪漂移。
主要贡献
虽然DSP-SLAM不是第一个利用形状先验从图像序列进行3D重建的方法,但它在许多方面都有所创新。
首先,与之前方法的不同点是我们的地图不仅表示对象,还将背景重建为稀疏特征点,在联合因子图中对其进行优化,将基于特征的方法和对象感知SLAM(高级语义地图)的最佳特性结合起来。
其次,尽管Node-SLAM也在实时SLAM系统中纳入了形状先验知识,但它使用稠密的深度图像进行形状优化,而DSP-SLAM可以仅使用RGB单目图像流进行计算,并且每个对象只需要50个3D点即可获得准确的形状估计。最后,尽管FroDO和DSP-SLAM都可以在单目RGB设置下运行,但FroDO是一种缓慢的批量方法,需要提前获取所有帧并与它们的相机姿态关联,而DSP-SLAM是一种在线、连续的方法,可以每秒运行10帧。在物体形状和姿势估计方面,在定量和定性上改进了自动标记,这是一种最先进的基于先验知识的物体重建方法。在KITTI里程计数据集上的实验表明,通过双目+激光雷达输入,我们的联合捆集调整在轨迹估计方面比用作主干的仅具备功能的双目系统ORB-SLAM2有所改进。此外,DSP-SLAM提供了与最先进的双目、仅激光雷达和 dynamic SLAM系统相当的跟踪性能,同时提供了丰富的稠密对象重建。DSP-SLAM还通过Freiburg Cars和Redwood OS数据集上的单目输入实现了较好的定性重建结果。
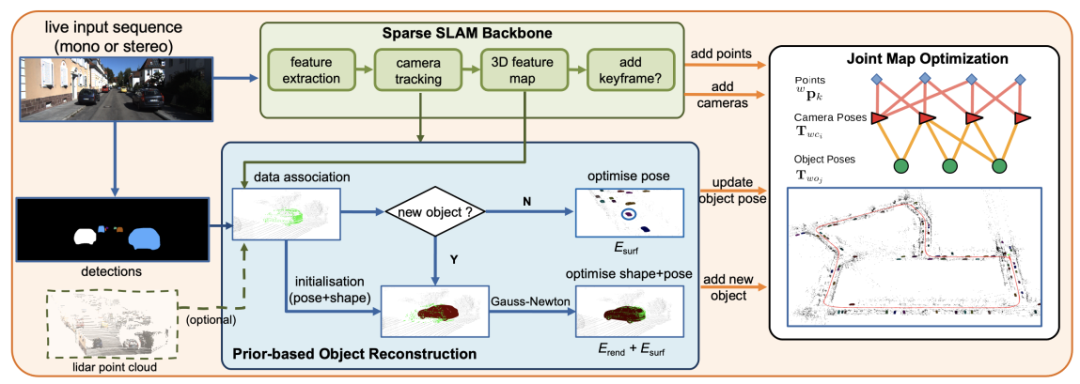
系统概述:DSP-SLAM输入单目或双目的实时图像流,推断对象mask,并输出特征点和稠密对象的联合地图,稀疏SLAM主模块提供每帧相机姿势和3D点云,在每个关键帧处,使用三维曲面一致性和渲染深度损失的组合,为每个新检测到的对象实例估计形状。DSP-SLAM可在3种不同模式下运行:单目、双目和双目+激光雷达。
主要内容
DSP-SLAM是一种根据输入序列数据实现定位和建图的方法,可重建检测对象的完整详细形状,同时将背景粗略地表示为一组稀疏的特征点。每个对象都表示为一个紧凑且可优化的向量z。DSP-SLAM的概述如图2所示。DSP-SLAM几乎实时运行(每秒10帧),并可在不同模式下运行。
稀疏SLAM框架:ORB-SLAM2用作跟踪和建图主框架,这是一种基于特征的SLAM框架,可对单目或双目序列进行操作,当跟踪线程根据对应关系以帧速率估计相机姿态时,建图线程通过重建三维地标来构建稀疏地图。
检测:我们在每个关键帧执行对象检测,共同推断2D边界框和分割mask,此外,通过检测3D边界盒获得物体姿态估计的初始估计。
数据关联:新检测对象将与现有地图对象关联,或通过对象级数据关联实例化为新对象,每个检测到的对象实例I包括2D边界框、2D的Mask、稀疏3D点云的dpeth观测值以及对象初始位姿。
基于优先级的对象重建:DSP-SLAM采用一组稀疏的3D点观测数据,这些数据可以来自重建的SLAM点云或激光雷达输入(在立体+激光雷达模式下),并优化形状和对象位姿,以最大限度地减少表面一致性和深度渲染损失。地图中已存在的对象将仅通过位姿优化更新其6-dof位姿。

图4:形状重建
联合因子图优化:通过捆集调整优化点特征、对象和相机姿势的联合因子图,以保持一致的地图并合并回路闭合,新对象作为节点添加到联合因子图中,其相对位姿将估计为相机对象的优化边。
实验
我们使用KITTI3D数据集上的激光雷达作为输入,与最相关的自动标记方法相比,对我们创新的基于先验的对象重建优化进行定量评估,此外,评估了我们的DSP-SLAM系统在stereo+LiDAR和KITTI里程计基准数据集上的仅有双目输入上的相机的轨迹误差,并与最先进的方法进行了比较。我们还提供了Freiburg Cars和Redwood OS数据集上纯单目输入的全SLAM系统的定性结果。
在KITTI3D上对简单和中等样本的对象长方体预测质量与自动标记进行定量比较。自动标签的结果取自他们的论文。最佳结果以粗体数字显示。

形状重建和位姿估计与自动标记方法的定性比较。左:输入RGB图像。中间:带DSP-SLAM的结果 右:带自动标记的结果。

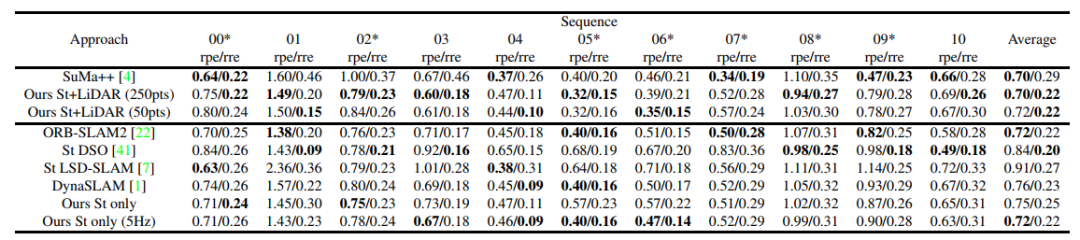
各种方法的相机跟踪精度比较结果
当每个对象使用不同数量的激光雷达点(N=250、50、10)时,对象重建结果。当点数从250减少到50时,没有明显的区别。当进一步降低到10时,重建质量开始下降。质量下降部位用红色圆圈标记。

Freiburg Cars数据集的定性结果

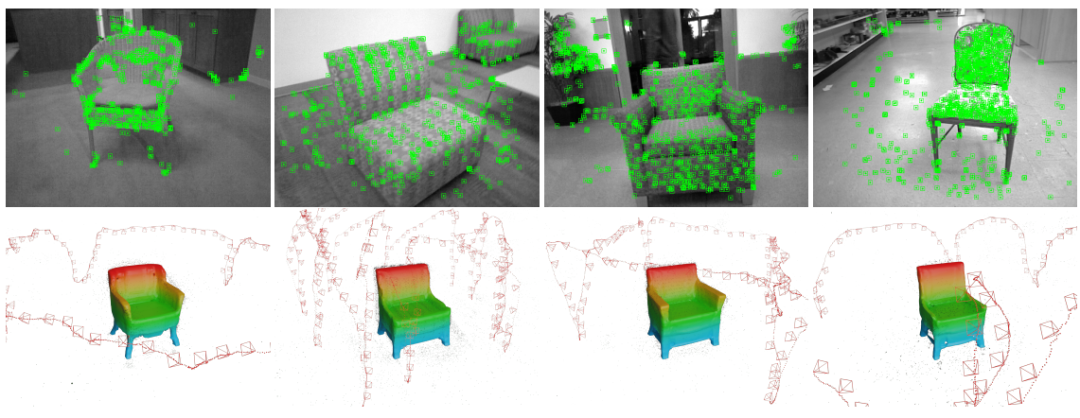
Redwood OS椅子数据集的定性结果
总结
本文提出了一种新的对象感知实时SLAM系统DSP-SLAM,该系统利用深度形状先验进行对象重建,生成背景稀疏点特征和检测对象稠密形状的联合地,我们在KITTI(双目和双目+激光雷达)等具有挑战性的真实世界数据集上,甚至在单目数据集上,都显示了几乎实时的性能,我们在相机轨迹估计和形状/位姿重建方面与其他方法进行了定量比较,结果显示其性能与最先进的方法相当或更高。
资源
三维点云论文及相关应用分享
【点云论文速读】基于激光雷达的里程计及3D点云地图中的定位方法
3D目标检测:MV3D-Net
三维点云分割综述(上)
3D-MiniNet: 从点云中学习2D表示以实现快速有效的3D LIDAR语义分割(2020)
win下使用QT添加VTK插件实现点云可视化GUI
JSNet:3D点云的联合实例和语义分割
大场景三维点云的语义分割综述
PCL中outofcore模块---基于核外八叉树的大规模点云的显示
基于局部凹凸性进行目标分割
基于三维卷积神经网络的点云标记
点云的超体素(SuperVoxel)
基于超点图的大规模点云分割
更多文章可查看:点云学习历史文章大汇总
SLAM及AR相关分享
【开源方案共享】ORB-SLAM3开源啦!
【论文速读】AVP-SLAM:自动泊车系统中的语义SLAM
【点云论文速读】StructSLAM:结构化线特征SLAM
SLAM和AR综述
常用的3D深度相机
AR设备单目视觉惯导SLAM算法综述与评价
SLAM综述(4)激光与视觉融合SLAM
Kimera实时重建的语义SLAM系统
SLAM综述(3)-视觉与惯导,视觉与深度学习SLAM
易扩展的SLAM框架-OpenVSLAM
高翔:非结构化道路激光SLAM中的挑战
SLAM综述之Lidar SLAM
基于鱼眼相机的SLAM方法介绍
点击下方微信视频号可查看最新研究成果及相关开源方案的演示:
如果你对本文感兴趣,请点击“原文阅读”获取知识星球二维码,务必按照“姓名+学校/公司+研究方向”备注加入免费知识星球,免费下载pdf文档,和更多热爱分享的小伙伴一起交流吧!
以上内容如有错误请留言评论,欢迎指正交流。如有侵权,请联系删除
扫描二维码
关注我们
让我们一起分享一起学习吧!期待有想法,乐于分享的小伙伴加入免费星球注入爱分享的新鲜活力。分享的主题包含但不限于三维视觉,点云,高精地图,自动驾驶,以及机器人等相关的领域。
分享及合作:群主微信“920177957”(需要按要求备注) 联系邮箱:[email protected],欢迎企业来联系公众号展开合作。
点一下“在看”你会更好看耶
更多相关:
-
RAM缓存 新RAM缓存算法(CLFUS) 新的RAM缓存使用的创意来自许多缓存替换策略和算法,包括LRU,LFU,CLOCK,GDFS及2Q,它被命名为时钟周期内最小频繁使用大小算法CLFUS(Clocked Least Frequently Used by Size)。它避开了任何专利算法,具有如下特性: 均衡最近性(Rec...
-
MP4 |视频:AVC,1280×720 30 fps |音频:AAC,48 KHz,2 Ch |时长:2h 12m 语言:英语+中英文字幕(根据原英文字幕机译更准确)|大小解压后:560M C4D是一个有抱负的运动图形艺术家和设计师的重要工具。借助C4D,您可以使用3D对象、动态效果和动画来增强运动图形、模型和可视化效果。本课...
-
文章目录先说问题:再说解决尝试1:尝试2(该尝试建议先在自己环境搭配对应业务测试通过后再现场尝试): 感谢 学无止境996同学的陪伴和vigourtyy美丽女友的支持,直到这个解决问题的深夜 先说问题: ceph 12.2.1生产环境:3副本 tier + 3副本data 机房在拥有业务的情况下重启集群交换机,产生如下场景...
-
这周主要学习了java中的类和对象的知识点,发现和C++中的类和对象极为相似,对于类和对象的概念理解起来也简单。同时在自学的过程中也把类的知识重新复习巩固了一下(如类的三大特征:继承,封装和多态,构造,成员对象的访问权限,构造,无参有参函数的调用等),同时也了解到一些新的概念,比如类对象创建和引用占据堆内存和栈内存,输出对象时默认调...
-
公众号致力于分享点云处理,SLAM,三维视觉,高精地图相关的文章与技术,欢迎各位加入我们,一起每交流一起进步,有兴趣的可联系微信:920177957。本文来自点云PCL博主的分享,未经作者允许请勿转载,欢迎各位同学积极分享和交流。资源三维点云论文及相关应用分享【点云论文速读】基于激光雷达的里程计及3D点云地图中的定位方法3D目标检测...
-
Thanks to LOAM, A-LOAM, and LIO-SAM code authors. The major codes in this repository are borrowed from their efforts.代码:https://github.com/gisbi-kim/SC-A-LOAM编译:点云PCL本...
-
文章:Inertial-Only Optimization for Visual-Inertial Initialization作者:Carlos Campos, Jose M.M. Montiel and Juan D. Tard ´ os´代码:https://github.com/bxh1/VIDO-SLAM.git编译:点云...
-
点云PCL免费知识星球,点云论文速读。文章:Monocular Object and Plane SLAM in Structured Environments作者:Shichao Yang, Sebastian Scherer翻译:particle本文仅做学术分享,如有侵权,请联系删除。欢迎各位加入免费知识星球,获取PDF论文,欢...
-
点云PCL免费知识星球,点云论文速读。文章:Persistent Map Saving for Visual Localization for Autonomous Vehicles: An ORB-SLAM 2 Extension作者:Felix Nobis∗, Odysseas Papanikolaou, Johannes Be...