蒙特卡洛方法的实例
本文通过五个例子,介绍蒙特卡罗方法(Monte Carlo Method)。
理论知识可从这个链接看:http://www.scratchapixel.com/lessons/mathematics-physics-for-computer-graphics/monte-carlo-methods-in-practice/monte-carlo-integration
一、概述
蒙特卡罗方法是一种计算方法。原理是通过大量随机样本,去了解一个系统,进而得到所要计算的值。
它非常强大和灵活,又相当简单易懂,很容易实现。对于许多问题来说,它往往是最简单的计算方法,有时甚至是唯一可行的方法。
它诞生于上个世纪40年代美国的"曼哈顿计划",名字来源于赌城蒙特卡罗,象征概率。
二、π的计算
第一个例子是,如何用蒙特卡罗方法计算圆周率π。
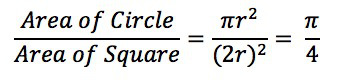
正方形内部有一个相切的圆,它们的面积之比是π/4。
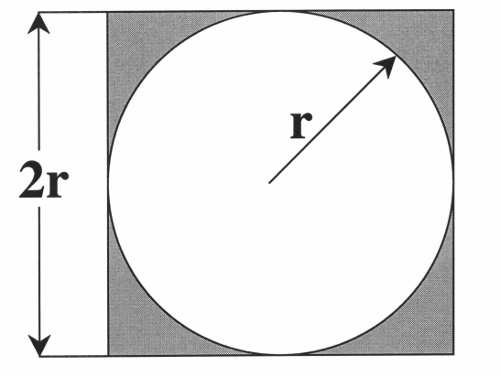
现在,在这个正方形内部,随机产生10000个点(即10000个坐标对 (x, y)),计算它们与中心点的距离,从而判断是否落在圆的内部。
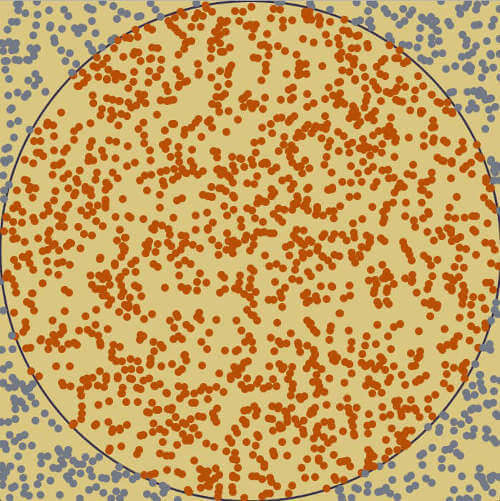
如果这些点均匀分布,那么圆内的点应该占到所有点的 π/4,因此将这个比值乘以4,就是π的值。通过R语言脚本随机模拟30000个点,π的估算值与真实值相差0.07%。
三、积分的计算
上面的方法加以推广,就可以计算任意一个积分的值。
比如,计算函数 y = x2 在 [0, 1] 区间的积分,就是求出下图红色部分的面积。
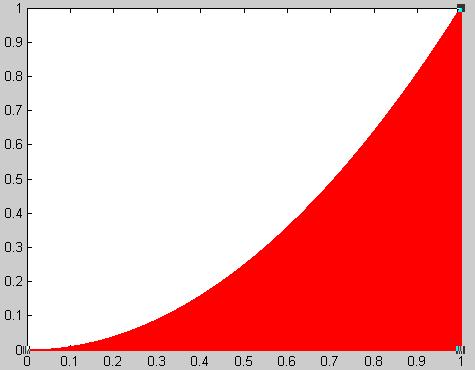
这个函数在 (1,1) 点的取值为1,所以整个红色区域在一个面积为1的正方形里面。在该正方形内部,产生大量随机点,可以计算出有多少点落在红色区域(判断条件 y < x2)。这个比重就是所要求的积分值。
用Matlab模拟100万个随机点,结果为0.3328。
四、交通堵塞
蒙特卡罗方法不仅可以用于计算,还可以用于模拟系统内部的随机运动。下面的例子模拟单车道的交通堵塞。
根据 Nagel-Schreckenberg 模型,车辆的运动满足以下规则。
当前速度是 v 。
如果前面没车,它在下一秒的速度会提高到 v + 1 ,直到达到规定的最高限速。
如果前面有车,距离为d,且 d < v,那么它在下一秒的速度会降低到 d - 1 。
此外,司机还会以概率 p 随机减速, 将下一秒的速度降低到 v - 1 。
在一条直线上,随机产生100个点,代表道路上的100辆车,另取概率 p 为 0.3 。

上图中,横轴代表距离(从左到右),纵轴代表时间(从上到下),因此每一行就表示下一秒的道路情况。
可以看到,该模型会随机产生交通拥堵(图形上黑色聚集的部分)。这就证明了,单车道即使没有任何原因,也会产生交通堵塞。
五、产品厚度
某产品由八个零件堆叠组成。也就是说,这八个零件的厚度总和,等于该产品的厚度。
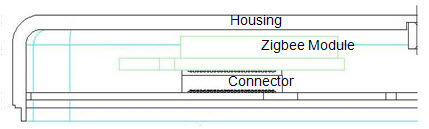
已知该产品的厚度,必须控制在27mm以内,但是每个零件有一定的概率,厚度会超出误差。请问有多大的概率,产品的厚度会超出27mm?
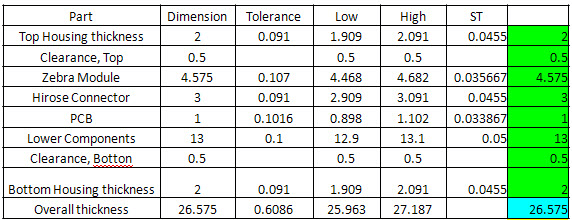
取100000个随机样本,每个样本有8个值,对应8个零件各自的厚度。计算发现,产品的合格率为99.9979%,即百万分之21的概率,厚度会超出27mm。
六、证券市场
证券市场有时交易活跃,有时交易冷清。下面是你对市场的预测。
如果交易冷清,你会以平均价11元,卖出5万股。
如果交易活跃,你会以平均价8元,卖出10万股。
如果交易温和,你会以平均价10元,卖出7.5万股。
已知你的成本在每股5.5元到7.5元之间,平均是6.5元。请问接下来的交易,你的净利润会是多少?
取1000个随机样本,每个样本有两个数值:一个是证券的成本(5.5元到7.5元之间的均匀分布),另一个是当前市场状态(冷清、活跃、温和,各有三分之一可能)。
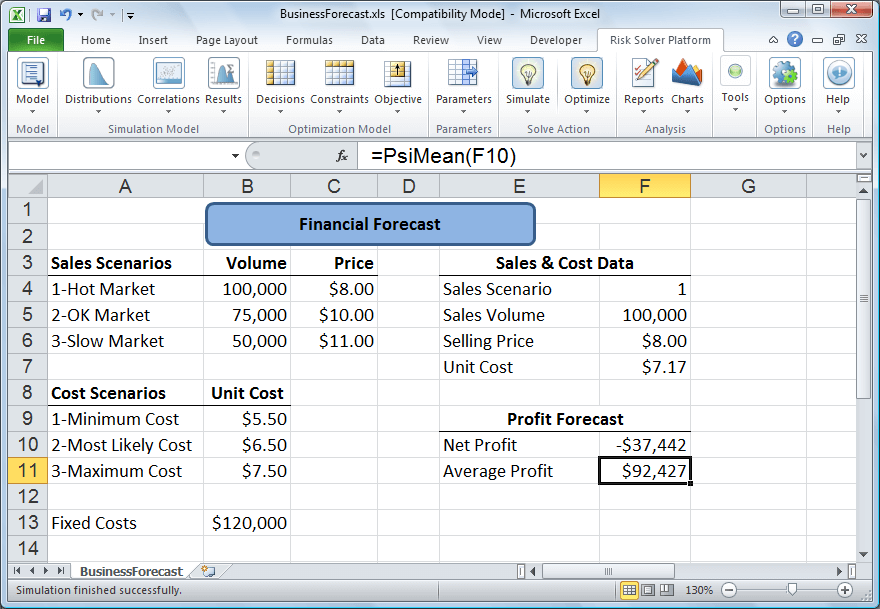
模拟计算得到,平均净利润为92, 427美元。
七,参考链接
Introduction To Monte Carlo Methods,by Alex Woods
Monte Carlo Simulation Tutorial
蒙特卡罗(Monte Carlo)方法简介,by 王晓勇
蒙特卡罗(Monte Carlo)模拟的一个应用实例
(完)
更多相关:
-
使用ngNonBindable停止框架渲染计算“{{}}”
计算1+1= {{ 1 + 1 }}
计算1+1= {{ 1 + 1 }}
渲染结果... -
利用图形处理器的力量 你会学到: 如何编写Unity计算着色器 如何在后处理图像过滤器中使用ComputeShaders 如何使用ComputeShaders进行粒子效果和群集 如何使用StructuredBuffers在计算着色器和实例表面着色器之间共享数据 使用计算机处理器处理流体模拟 使用计算机开发者创建物理引擎 MP...
-
那天听了小牛师兄关于CFD应用的四种境界的说法后,小白发现自己连第一种境界都算不上,自己对于CFD还只是停留在做了少数几个案例的基础上,可以说是对其一无所知。不过小白不是那种遇到挫折就退缩的人,他决定沿着黄师姐的方法从软件入手继续学下去。在认真的做完了敲门实例后,小白又认真的做了几个FLUENT实例文档中的案例,虽然说案例都比较简单...
-
相信很多朋友在利用matlab进行计算时,会遇到循环次数过大,或者是单次计算量过大的问题,比如需要计算的数值阵列数据量过大,利用传统的编程方式,跑一次程序几个小时,都要等的急死了是不是呢?如果遇到这种情况,则可以尝试一下MATLAB并行计算,传统的计算方式都是串行计算。并行计算之所以可行,取决于两方面因素:a)现在大家的计算机是多核的...
-
来源:公众号|计算机视觉工坊(系投稿)作者:仲夏夜之星「3D视觉工坊」技术交流群已经成立,目前大约有12000人,方向主要涉及3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、学术交流、...
-
点云PCL免费知识星球,点云论文速读。文章:Real-Time LIDAR-Based Urban Road and Sidewalk Detection for Autonomous Vehicles作者:Ern˝o Horváth , Claudiu Pozna ,and Miklós Unger编译:点云PCL代码:http...
-
文章:Semantic Histogram Based Graph Matching for Real-Time Multi-Robot Global Localization in Large Scale Environment作者:Xiyue Guo, Junjie Hu, Junfeng Chen, Fuqin Deng, T...
-
点云PCL免费知识星球,点云论文速读。文章:Robust Place Recognition using an Imaging Lidar作者:Tixiao Shan, Brendan Englot, Fabio Duarte, Carlo Ratti, and Daniela Rus编译:点云PCL(ICRA 2021)开源代码:...
-
文章:A Survey of Calibration Methods for Optical See-Through Head-Mounted Displays作者:Jens Grubert , Yuta Itoh, Kenneth Moser编译:点云PCL本文仅做学术分享,如有侵权,请联系删除。欢迎各位加入免费知识星球,获取PD...