CUDA学习2
CUDA简介
CUDA是并行计算的平台和类C编程模型,我们能很容易的实现并行算法,就像写C代码一样。只要配备的NVIDIA GPU,就可以在许多设备上运行你的并行程序,无论是台式机、笔记本抑或平板电脑。熟悉C语言可以帮助你尽快掌握CUDA。
CUDA编程
CUDA编程允许你的程序执行在异构系统上,即CUP和GPU,二者有各自的存储空间,并由PCI-Express 总线区分开。因此,我们应该先注意二者术语上的区分:
- Host:CPU and itsmemory (host memory)
- Device: GPU and its memory (device memory)
代码中,一般用h_前缀表示host memory,d_表示device memory。
kernel是CUDA编程中的关键,他是跑在GPU的代码,用标示符__global__注明。
host可以独立于host进行大部分操作。当一个kernel启动后,控制权会立刻返还给CPU来执行其他额外的任务。所以,CUDA编程是异步的。一个典型的CUDA程序包含由并行代码补足的串行代码,串行代码由host执行,并行代码在device中执行。host端代码是标准C,device是CUDA C代码。我们可以把所有代码放到一个单独的源文件,也可以使用多个文件或库。NVIDIA C编译器(nvcc)可以编译host和device生成可执行程序。
这里再次说明下CUDA程序的处理流程:
- 从CPU拷贝数据到GPU。
- 调用kernel来操作存储在GPU的数据。
- 将操作结果从GPU拷贝至CPU。
Memory操作
cuda程序将系统区分成host和device,二者有各自的memory。kernel可以操作device memory,为了能很好的控制device端内存,CUDA提供了几个内存操作函数:

为了保证和易于学习,CUDA C 的风格跟C很接近,比如:
cudaError_t cudaMalloc ( void** devPtr, size_t size )
我们主要看看cudaMencpy,其函数原型为:
cudaError_t cudaMemcpy ( void* dst, const void* src, size_t count,cudaMemcpyKind kind )
其中cudaMemcpykind的可选类型有:
- cudaMemcpyHostToHost
- cudaMemcpyHossToDevice
- cudaMemcpyDeviceToHost
- cudaMemcpuDeviceToDevice
具体含义很好懂,就不多做解释了。
对于返回类型cudaError_t,如果正确调用,则返回cudaSuccess,否则返回cudaErrorMemoryAllocation。可以使用char* cudaGetErrorString(cudaError_t error)将其转化为易于理解的格式。
组织线程
掌握如何组织线程是CUDA编程的重要部分。CUDA线程分成Grid和Block两个层次。
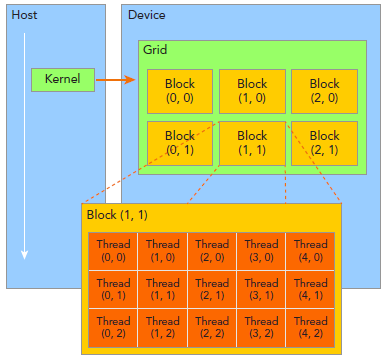
由一个单独的kernel启动的所有线程组成一个grid,grid中所有线程共享global memory。一个grid由许多block组成,block由许多线程组成,grid和block都可以是一维二维或者三维,上图是一个二维grid和二维block。
这里介绍几个CUDA内置变量:
- blockIdx:block的索引,blockIdx.x表示block的x坐标。
- threadIdx:线程索引,同理blockIdx。
- blockDim:block维度,上图中blockDim.x=5.
- gridDim:grid维度,同理blockDim。
一般会把grid组织成2D,block为3D。grid和block都使用dim3作为声明,例如:
dim3 block(3);
// 后续博文会解释为何这样写grid
dim3 grid((nElem+block.x-1)/block.x);需要注意的是,dim3仅为host端可见,其对应的device端类型为uint3。
启动CUDA kernel
CUDA kernel的调用格式为:
kernel_name<<
其中grid和block即为上文中介绍的类型为dim3的变量。通过这两个变量可以配置一个kernel的线程总和,以及线程的组织形式。例如:
kernel_name<<<4, 8>>>(argumentt list);
该行代码表明有grid为一维,有4个block,block为一维,每个block有8个线程,故此共有4*8=32个线程。

注意,不同于c函数的调用,所有CUDA kernel的启动都是异步的,当CUDA kernel被调用时,控制权会立即返回给CPU。
函数类型标示符

__device__ 和__host__可以组合使用。
kernel的限制:
- 仅能获取device memory 。
- 必须返回void类型。
- 不支持可变数目参数。
- 不支持静态变量。
- 不支持函数指针。
- 异步。
代码分析

#include
#include
#define CHECK(call)
{ const cudaError_t error = call; if (error != cudaSuccess) { printf("Error: %s:%d, ", __FILE__, __LINE__); printf("code:%d, reason: %s
", error, cudaGetErrorString(error)); exit(1); }
}
void checkResult(float *hostRef, float *gpuRef, const int N) {double epsilon = 1.0E-8;bool match = 1;for (int i=0; i epsilon) {match = 0;printf("Arrays do not match!
");printf("host %5.2f gpu %5.2f at current %d
",hostRef[i],gpuRef[i],i);break;}}if (match) printf("Arrays match.
");
}
void initialData(float *ip,int size) {// generate different seed for random numbertime_t t;srand((unsigned) time(&t));for (int i=0; i>>(d_A, d_B, d_C);printf("Execution configuration <<<%d, %d>>>
",grid.x,block.x);// copy kernel result back to host sidecudaMemcpy(gpuRef, d_C, nBytes, cudaMemcpyDeviceToHost);// add vector at host side for result checkssumArraysOnHost(h_A, h_B, hostRef, nElem);// check device resultscheckResult(hostRef, gpuRef, nElem);// free device global memorycudaFree(d_A);cudaFree(d_B);cudaFree(d_C);// free host memoryfree(h_A);free(h_B);free(hostRef);free(gpuRef);return(0);
}
编译指令:$nvcc sum.cu -o sum
运行: $./sum
输出:
./sum Starting...
Vector size 32
Execution configuration <<<1, 32>>>Arrays match.更多相关:
-
编译很头疼,出现以下问题: CMake Error: The following variables are used in this project, but they are set to NOTFOUND. Please set them or make sure they are set and tested correct...
-
CUDA编目录: 1.什么是CUDA 2.为什么要用到CUDA 3.CUDA环境搭建 4.第一个CUDA程序 5. CUDA编程 5.1. 基本概念 5.2. 线程层次结构 5.3. 存储器层次结构 5.4. 运行时API 5.4.1. 初始化 5.4.2. 设备管理 5.4.3. 存储器管理 5.4.3.1...
-
union { float data[4]; struct { float x; float y; float z; }; };...
-
在立方体贴图空间内发射光线(视线),计算球面光线(视线)会击中哪个面的哪个像素的像素值,最终生成Equirectangular全景图。 InitSceneTexture():先获取Cubemaps并将其绑定在GPU中 void InitSceneTexture() {char* path = "./Cubemaps";myEnvi...
-
对于同一场景的2D全景图,如果想改变其视野中心位置,比如下图,初始情况下视野的中心位置是蓝框,如果想让红框的灯位于中心位置该怎么做呢? #include "opencv2/highgui/highgui.hpp" #include "opencv2/opencv.hpp" #include
-
常量内存是NVIDIA提供的一个64KB大小的内存空间,它的处理方式和普通的全局内存和共享内存都不一样,是有cuda专门提供的。 线程束的概念:线程束是指一个包含32个线程的集合,在程序中的每一行,线程束中的每个线程都将在不同的数据上执行相同的指令。 因此,常量内存的作用是,能够将单次内存的读取操作广播到每个半线程束(即16个线程...
-
1、初始化,设置背景色 void glClear(int mask) 清除缓存 实參含义:GL10.GL_COLOR_BUFFER_BIT 清除颜色缓存 GL10.GL_DEPTH_BUFFER_BIT 清除深度缓存 ...