OpenCV 像素存储
像素存储
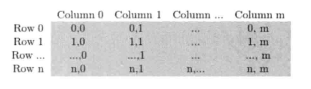
OpenCV 中图像矩阵的大小取决于所用的颜色模型,更准确的说是取决于图像所用到的通道数。
如果使用的是灰度图,矩阵大概如图所示:
如果使用的是多通道的图像,矩阵中的列会包含多个子列,子列的个数和通道数相等。例如 RGB 颜色模型的矩阵大致如下图所示:

很多情况下,因为内存足够大,可以实现连续存储,因此图像中的各行能够一行一行的连接起来,形成一个长行。连续存储有助于提升图像扫描速度,我们可以使用 isContinuous 来判断矩阵是不是连续存储的。
简单示例
下面模拟实现减少图像颜色的操作
// ---------------------【 colorReduce() 函数 】------------------
// 描述:使用【指针访问:C操作符[]】方法版的颜色空间缩减函数
// --------------------------------------------------------------
void colorReduce (Mat& inputImage, Mat& outputImage, int div)
{// 参数准备outputImage = inputImage.clone()j;int rowNumber = outputImage.rows(); // 行号int colNumber = outputImage.clos * outputImage.channels(); // 列数 * 通道数 = 每一行元素的个数// 双重循环,遍历所有的元素for (int i = 0; i < rowNumber; ++i) {uchar* data = outputImage.ptr(i); // 获取第 i 行的首地址for (int j = 0; j < colNumber; ++j) {// ------ 【开始处理了每个元素】------data[j] = data[j] / div * div + div / 2;}}
}
Mat 类有若干成员函数,可以获取到图像的属性。公有成员函数变量 cols 和 rows 给出了图像大的宽和高,而成员函数 channels() 用于返回图像的通道数。灰度图的通道数是 1,彩色图的通道数是3.
以上示例还可以使用迭代器的方式实现
void colorReduce (Mat& inputImage, Mat& outputImage, int div)
{// 参数准备outputImage = inputImage.clone();// 获取迭代器Mat_::iterator it = outputImage.begin(); // 初始位置Mat_::iterator itend = outputImage.end()' // 结束位置for (; it != itend; ++it) {(*it)[0] = (*it)[0] /div * div + div /2;(*it)[1] = (*it)[1] /div * div + div /2;(*it)[2] = (*it)[2] /div * div + div /2;}
}
更多相关:
-
{{tipContent}} flash类型的广告的包装代码
...下面的代码给出一个简单的js检测鼠标点击事件来动态放大图片的功能,这个功能在亚马逊,京东等电商网站很实用。 <...
之前我们已经写好管理员页面,现在对功能继续实现 基础功能1:对管理进行增删改查 增加 需要在view中新建一个add.html add.html
教程简介 OpenCV 是计算机视觉中经典的专用库,然而其中文版官方教程久久不来。近日,一款最新 OpenCV4.1 版本的完整中文版官方教程出炉,读者朋友可以更好的学习了解 OpenCV 相关细节。教程来自 objectdetection.cn 。 教程目录 OpenCV 简介 0_OpenCV-Python Tutorials O...
公众号致力于分享点云处理,SLAM,三维视觉,高精地图相关的文章与技术,欢迎各位加入我们,一起每交流一起进步,有兴趣的可联系微信:920177957。本文来自点云PCL博主的分享,未经作者允许请勿转载,欢迎各位同学积极分享和交流。IPM模型在解释自适应的IPM模型之前,首先需要了解使用相机的物理参数来描述IPM的基本模型[1](这篇...
公众号致力于分享点云处理,SLAM,三维视觉,高精地图相关的文章与技术,欢迎各位加入我们,一起每交流一起进步,有兴趣的可联系微信:920177957。本文来自点云PCL博主的分享,未经作者允许请勿转载,欢迎各位同学积极分享和交流。前言前段时间刚分享的AVP-SLAM文章中有一个知识点叫做IPM(逆透视变换)AVP-SLAM:自动泊车...
标题:The algorithm to generate color point-cloud with the registration between panoramic imageand laser point-cloud作者:Fanyang ZENG, Ruofei ZHONG 编译:点云PCL来源: https://iops...
目前深度图像的获取方法有激光雷达深度成像法,计算机立体视觉成像,坐标测量机法,莫尔条纹法,结构光法等等,针对深度图像的研究重点主要集中在以下几个方面,深度图像的分割技术 ,深度图像的边缘检测技术 ,基于不同视点的多幅深度图像的配准技术,基于深度数据的三维重建技术,基于三维深度图像的三维目标识别技术,深度图像的多分辨率建模和几何压缩技术...
本文概要: 本文主要是模拟实现STL中迭代器和const迭代器的,主要阐述的一个问题就是,为什么我们在设计迭代器的时候需要使用三个模板参数呢 在设计迭代器的时候,我们有下面的代码 #include
using namespace std;template struct _ListNode {... 随着国内内控的兴起,经常有人会问,内控跟IT安全有什么关系?为什么内控话题总是被搞信息安全的人经常提及?我想,一方面,是因为内控与信息安全存在内在的联系,另一方面,则是信息安全从业人员为了找到体现自身价值的附着点吧。 内控与IT的关系企业内部控制(简称“内控”)是一个涉及广泛的概念,根据ISACA组织的定义,内部控制指“为减少风险所...