ceph存储 PG的状态机 源码分析
文章目录
- PG 的状态机和peering过程
- 1. PG 状态机变化的时机
- 2. pg的状态演化过程
- 3. pg状态变化实例讲解
- 3.1 pg状态的管理结构
- 3.2 数据的pg状态变化过程
- 3.2.1 NULL -> initial
- 3.2.2 initial -> reset -> Started
- 3.2.3 Started(start) ->Started( primary(Peering(GetInfo)))
- 3.2.4 GetInfo->GetLog
- 3.2.5 GetLog->GetMissing
- 3.2.6 GetMissing->Active(Activating)
- 3.2.7 Active(Activating)-> WaitLocalRecoveryReserved->WaitRemoteRecoveryReserved-> Active(recovering)
- 3.2.8 recovering->recoverd->clean
PG 的状态机和peering过程
首先来解释下什么是pg peering过程?
当最初建立PG之后,那么需要同步这个pg上所有osd中的pg状态。在这个同步状态的过程叫做peering过程。同样当启动osd的时候,这个osd上所有的pg都要进行peering过程,同步pg的状态。peering过程结束后进入pg的Active状态,如果需要进行数据恢复则进行数据的恢复工作。
那么从PG的创建或者扫描开始,PG就开始设置了自己的初始状态,到最后的完全同步,这期间使用一个叫做state_machine的机制进行标记和处理,然后加上事件机制进行通信。最后达到active+clean。
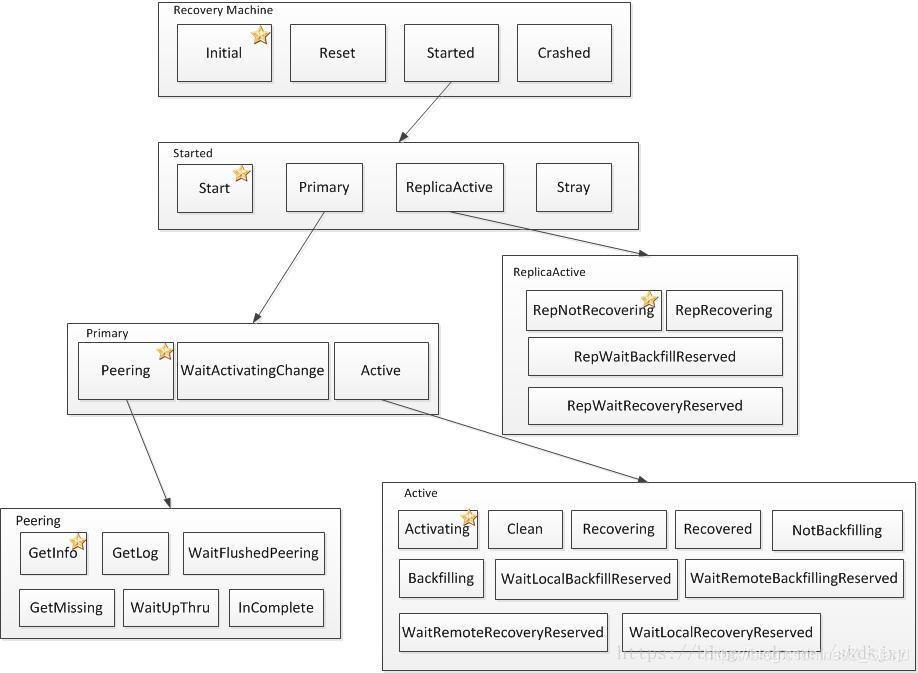
下面是一个pg的所有状态,pg的状态管理全部都交给一个叫做recoverymachine的成员来管理,pg的所有的状态是一个类似树形的结构,每个状态可能存在子状态,子状态还可能存在子状态如下图
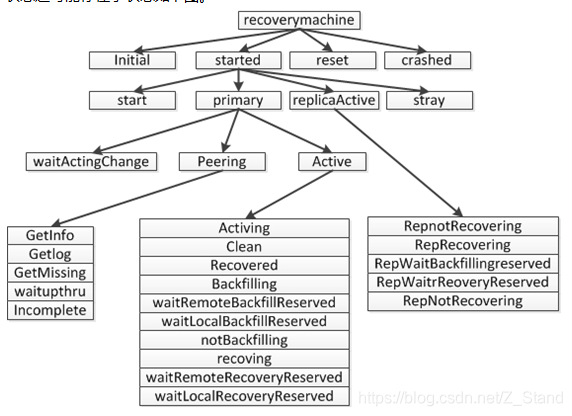
pg的状态变化是一套状态机,根据不同的状态接收到不同的事件进行相互的转化
1. PG 状态机变化的时机
a.创建pg后,会经过一系列的PG的状态变化,由Initial最后演化成Active+clean状态。
b.就是osd启动后,会进行PG扫描,扫描后会重新在本osd上建立PG,然后在经过一系列的pg状态变化,最后达到clean状态。
c.当其他osd启动后,如果和本osd处于同一个PG内,会收到pg成员变化事件,处理该事件则本osd上的pg状态也会重新被设置,再次经历状态变化,最后达到平衡的clean状态
2. pg的状态演化过程
下面经过一个pg状态变化的过程说起,这个过程叫做PG的peering过程。peering的过程其实就是pg状态从初始状态然后到active+clean的变化过程。一个osd启动之后,上面的pg开始工作,状态为initial,这时进行比对所有osd上的pglog和pg_info,对pg的所有信息进行同步,选举primary osd和replica osd,peering过程结束,然后把peering的结果交给recovering,有recovering过程进行数据的恢复工作(如下图)。primary osd与replica osd经过一系列的状态事件的交互,最后达到active状态


3. pg状态变化实例讲解
3.1 pg状态的管理结构
-
pg在创建或者扫描时都会重新的把pg的结构创建起来,上一节在pg创建的时候已经说了,由monitor 会发送事件给osd,osd会处理事件,并且完成pg的创建工作。这里和故障恢复有密不可分的关系,下一节讲述数据的故障恢复。
-
创建pg的时候会初始化一个叫做recovery_state的成员,该成员就是用来控制pg的状态变化和处理事件的机制。recover_state中存在一个成员叫做recovery_machie,该成员继承了boost::statechart::state_machine状态机,该状态机就是用来处理状态变化的。
pg与state_machine的关系如下图
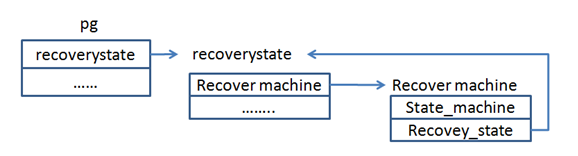
该途中表明了几个数据结构之间的关系
3.2 数据的pg状态变化过程
3.2.1 NULL -> initial
1). 来看一下申请PG的时候 对PG结构的初始化。在PG进行初始化的时候就对recoverystate(this)。
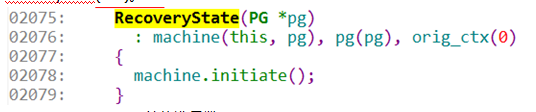
2075:recoverystate的构造函数。
2078:对于machine进行初始化。这时初始化machine的状态为Initial状态。
3.2.2 initial -> reset -> Started
2). 创建PG之后,就要对PG的发送一系列的事件了,首先是创建事件,调取函数handle_create()。在handle_create中主要发送了两个事件
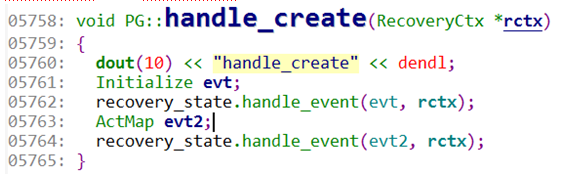
5758:handle_create()处理函数。
5761:申请一个 Initialize d的事件evt。
5762:本端的recoverystate处理该事件。handle_event中调用machine. process_event ()。交由状态机进行处理。当状态为Initial的machine遇见Initialize事件会转化状态为reset状态。因为在initial状态里定义了,如果收到了Initialize事件则将状态转化为reset
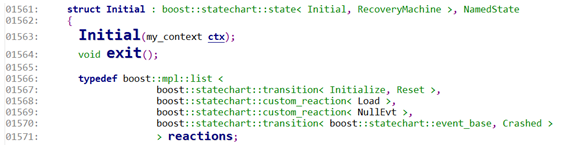
1567:定义了如果在Initial状态的时候,收到了Initialize事件,则转化为Reset状态。
目前是已经为Reset的状态了。带着这个状态再回到handle_create中
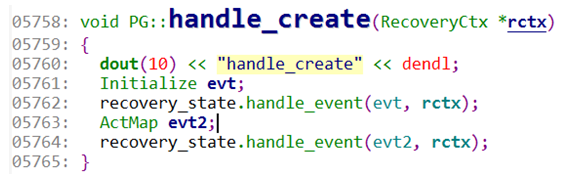
5763:这里定义了第二个事件 ActMap 的evt2.
5764:通过recoverystate.handle_event()再次交给machine。但是这时machine的状态已经变成了Reset了,由Reset状态开始处理Actmap事件。在reset的事件处理函数中boost::statechart::result PG::RecoveryState::Reset::react(const ActMap&),最后将状态转化为了Started。transit< Started >()。然后来看Started状态,转化成该状态后又继续处理状态,在定义Started的时候默认设置了一个子状态start
3.2.3 Started(start) ->Started( primary(Peering(GetInfo)))
3). 来看一下当进入start时是怎么来处理的

6010:开始处理进入start状态后的处理。
6016:找到对应处理的PG。
6017:如果当前的osd在本pg里是 primary。
6020:向本状态发送事件MakePrimary()事件。
6022:如果当前的osd在本pg里是replica。
6025:向本状态发送事件MakeStray。
4). 接下来看看start状态如何来处理MakePrimary和MakeStray的事件吧,下面来看。

1653:如果接受到MakePrimary事件,则将状态start转化为Primary状态。
1654:如果接受到Makestray事件,则将状态start转化为stray状态。
接下来按着Primary osd的流程走。在进入Primary状态之后,在Primary状态存在一个子状态叫做Peering状态。并且Peering也同样存在一个子状态叫做GetInfo。在GetInfo的函数PG::RecoveryState::GetInfo::GetInfo()中做了哪些事情。

7375:创建当前pg的OSD集合。为数据的恢复做准备。下一节数据恢复时会讲述。
7379:发送请求到所有的副本osd中,请求pg_info信息,发送事件MQuery& query,query的类型是pg_query_t::INFO。然后发送的请求都会记录在peer_info_request队列中。
7381:如果想其他的osd发送的查询pg_info事件,那一定会添加到peer_info_request队列中,所以这里就不为空,然后就结束了。此时状态就到这里,目前是GetInfo的状态。等待replica osd获取pg_info结束后,再将结果通过事件发送给primary osd。
3.2.4 GetInfo->GetLog
5). 当primary osd接到事件MNotifyRec& infoevt,然后对该事件展开处理。在GetInfo的状态下处理该事件,在处理该事件的时候会对拉取的pginfo进行处理,最后如果所有的副本都成功的将信息返回了,则会本端再次发起事件post_event(GotInfo());当GetInfo状态收到事件GotInfo(),则会转换状态为GetLog。现在交给了GetLog状态来继续处理,在进入GetLog中,做了如下的操作
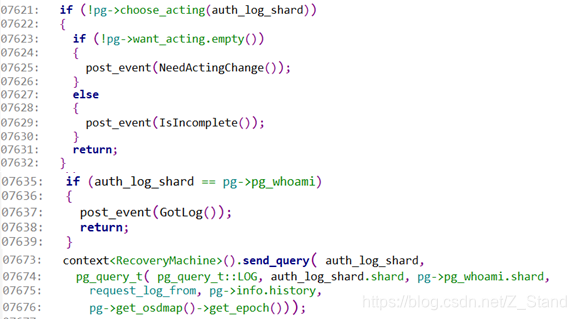
7621:这里要进行选择acting。包括了选择auth_osd、primary选择,副本选择(计算backfill osd,recover osd)。
7635:判断auth是不是正在处理的本osd上,如果是自己的话,那自己本身就是最全的log,所以不需要拉取log。
7637:因为不用拉取其他osd上的log,所以这里直接发送Gotlog事件,说明不需要拉取log,可以进入下一个状态了。
7673:由于自己本是auth osd,所以不是最全的log,所以要从其他osd上拉取log,这里准备事件g_query_t::LOG,发送到目标auth osd上拉取
3.2.5 GetLog->GetMissing
6). 本端使用handle_pg_query 处理g_query_t::LOG,将其封装成为MOSDPGLog消息,该消息发送到目标auth osd后,有auth osd解封消息,并且构造PG::MLogRec事件,发送给auth_osd处理,在auth_osd上形成MQuery& query 交给pg的state_machine处理,处理该事件,pg->fulfill_log(),获取本地log,然后通过消息MOSDPGLog发还给primary osd。这时primary 接到auth_osd发送过来的消息,并且消息携带auth_log的信息。在primary解析成为MLogRec 信息。这时primary osd的状态为GetLog,开始处理MLogRec 事件。直接出发post_event(GotLog())事件,当GetLog接收到Gotlog事件的时候,先要合并proc_master_log(),然后转换状态为GetMissing状态。
GetMissing的处理,在GetMissing中开始拉取所有副本的log信息,发送事件,等待所有的副本将自己的log和missing准备好发送给primary osd。这时primary osd处于GetMissing状态处理MLogRec事件,处理时proc_replica_log(),合并副本的log
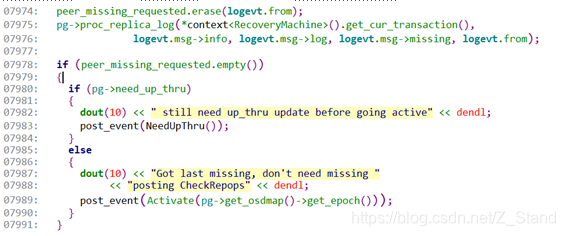
7974:当接受的log事件时候,将peer_missing_requested 队列中对应osd的计数删除。这个队列方便统计哪些osd没有及时的反馈消息。
7975:接收事件后,开始处理事件,proc_replica_log()合并副本的INFO,log,missing等信息。
7978:判断是否需要更新up_thru。
7983:如果需要更新up_thru。则发送NeedupThru事件。
7989:如果不需要更新up_thru,则发送Activate()事件。
3.2.6 GetMissing->Active(Activating)
7). 假设这里发送了Activate()事件,GetMissing状态会对Activate事件直接将状态转化为Active状态,在进入Active后会调用PG::activate的处理。在Activete的处理中有两件事儿.。a.准备事务的回调准备工作,申请注册C_PG_ActivateCommitted。b.准备想其他的osd发送合并后的log,将权威的log封装成MOSDPGLog,发送给副本,然后提交事务。
这时其他osd副本接收到MOSDPGLog事件,将解释为本地的MLogRec,副本osd的pg状态为stray,接收到MLogRec事件后。主要做的有三件事儿:a.合并接收到的log到本地log中,b.准备发送事件Activate,c.转化到状态ReplicaActive。最后由ReplicaActive状态处理事件Activate。这时同样会调用PG::activate()处理。这里主要准备了两件事儿,
1.准备申请注册事务的回调处理函数C_PG_ActivateCommitted
2.准备进行数据恢复时的各种状态设置。完成后提交事务操作,等待事务完成。
目前,有两件事儿需要说明一下,primary osd提交了事务等待C_PG_ActivateCommitted处理,replica osd同样提交了事务等待C_PG_ActivateCommitted处理。接下来就来看看这个里边做了哪些工作
primary osd处理完成后,提交事务回调进入_activate_committed中,
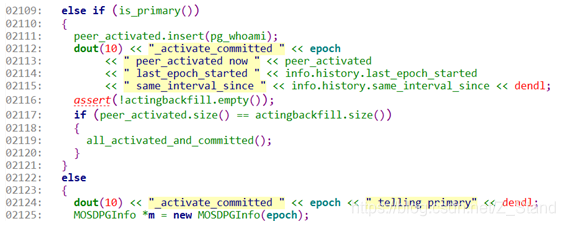
2109:如果这时判断本osd是主osd。
2117:判断是不是所有的osd都返回了提交了结果。
2119:如果是primary osd,并且所有的replica都提交了结果,则进行all_activated_and_committed()处理。
2125:如果不是primary osd,而是replica osd这时就要告诉primary osd,我已经处理好了,发送消息 MOSDPGInfo。
8). 当primary osd接收到MOSDPGInfo消息,解析为MInfoRec事件,这时primary osd的状态为active,接收MInfoRec开始处理。

6998:当向一个osd发送MOSDPGLog后,会在对应osd的序号添加到peer_active的队列中,当osd反馈消息MOSDPGInfo后,会将osd的序号添加到actingbackfill队列中。这里判断是不是所有的osd都处理完成了事务。
7000:如果所有的osd都完成了事务的处理,接下来进入all_activated_and_committed处理中。在all_activated_and_committed中主要是要发送事件通知PG的状态,通知告知已经是AllReplicasActivated事件
3.2.7 Active(Activating)-> WaitLocalRecoveryReserved->WaitRemoteRecoveryReserved-> Active(recovering)
active接受到AllReplicasActivated事件后,开始处理,这其中主要调用pg-> on_activate ()函数。由于PG是由ReplicatedPG子类继承的,所以这里调用ReplicatedPG::on_activate 进行处理。
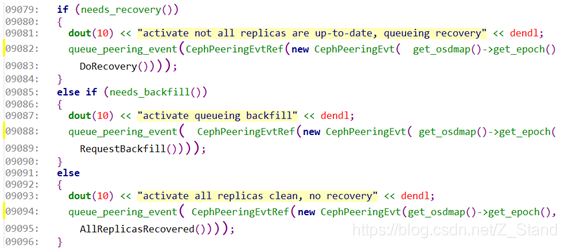
9079:判断是否需要进行recovery数据的恢复。
9082:如果需要进行数据恢复,则发送事件DoRecovery()事件。
9085:判断是否需要进行backfill数据恢复。
9088:如果需要进行backfill数据恢复,则需要发送事件RequestBackfill()事件。
9091:即不需要recovery也不需要backfill等操作,则发送事件AllReplicasRecovered事件。
9).假设这里需要进行数据的恢复,这时发送了DoRecovery事件。activ状态接受到事件DoRecovery后进入子状态WaitLocalRecoveryReserved。该状态是active的子状态,仍让处于active状态中。在WaitLocalRecoveryReserved中会进行reserver处理并且发送LocalRecoveryReserved事件,WaitLocalRecoveryReserved接受到该事件后将转化为WaitRemoteRecoveryReserved状态。进入该状态后发RemoteRecoveryReserved事件,处理该事件时再次发送事件AllRemotesReserved,状态转化为Recovering。
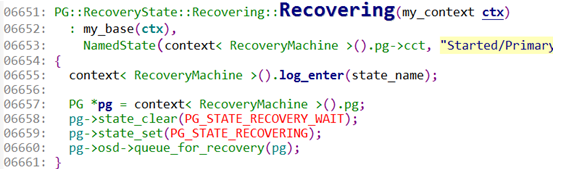
6651:进入recovering时要进行的处理。
6658:清除PG的state中的PG_STATE_RECOVERY_WAIT。
6659:设置PG的state中的 PG_STATE_RECOVERING。
6660:准备将pg交给osd的recovery线程处理,进行数据恢复,这里是先添加到recovery_wq,然后等待线程处理队列中的pg数据恢复请求。
3.2.8 recovering->recoverd->clean
10). 该队列是由osd->recovery_wq 来实现的,而不是OSDService-> recovery_wq。
该队列的处理线程直接调用函数OSD::do_recovery()进行处理。在其中主要使用pg-> start_recovery_ops进行处理,在start_recovery_ops中判断这个pg已经数据恢复完成的时候。
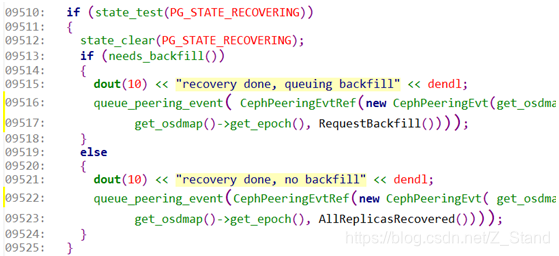
代码能进行到这里说明已经PG的数据恢复完成。
9510:这时检测状态是不是正在进行数据恢复状态是否为PG_STATE_RECOVERING。
9512:清除状态PG_STATE_RECOVERING。
9513:判断是不是要进行backfill处理?
9522:如果不需要进行backfill处理,这时代表所有的数据恢复都完成了,则发送事件AllReplicasRecovered。
11). 这时recovering状态的pg接收到AllReplicasRecovered事件,则将pg的状态转化为Recovered状态。这时将会再次发送GoClean()事件。PG接收到GoClean()事件,将转化为clean状态
最后的PG状态就是Active+clean的状态。clean是Active的一个子状态。最终完成了PG的所有状态变换
更多相关:
-
关于如何在有噪声的数据中进行状态估计的问题的理解,状态估计的问题是指在运动和观测方程中,通常假设两个噪声ωiomega_i和υk,jupsilon_{k,j}满足零均值的高斯分布, xk=f(xk−1,uk)+ωkx_k=f(x_{k-1},u_k)+omega_k其中ωk→N(0,Rk)omega_k ightarro...
-
强化学习(英语:Reinforcement learning,简称RL)是机器学习中的一个领域,强调如何基于环境而行动,以取得最大化的预期利益。其灵感来源于心理学中的行为主义理论,即有机体如何在环境给予的奖励或惩罚的刺激下,逐步形成对刺激的预期,产生能获得最大利益的习惯性行为。这个方法具有普适性,因此在其他许多领域都有研究,例如博弈...
-
什么是状态模式? 定义:将事物内部的每个状态分别封装成类,内部状态改变会产生不同行为。 主要解决:对象的行为依赖于它的状态(属性),并且可以根据它的状态改变而改变它的相关行为。 何时使用:代码中包含大量与对象状态有关的条件语句。 如何解决:将各种具体的状态类抽象出来。 应用实例: 1、打篮球的时候运动员可以有正常状态、不正常状态和超...
-
别小看这个功能, 感觉在写一些技术 Blog 的情况下还是挺有用的. 打开QQ拼音: 输入法设置->基本设置->初始状态->中文状态下使用英文标点. 转载于:https://www.cnblogs.com/qrlozte/p/4904087.html...
-
addEventListener()与removeEventListener()用于处理指定和删除事件处理程序操作。所有的DOM节点中都包含这两种方法,并且它们都接受3个参数:要处理的事件名、作为事件处理程序的函数和一个布尔值。最后这个布尔值参数是true,表示在捕获阶段调用事件处理程序;如果是false,表示在冒泡阶段调用事件处理...
-
有时候当我们单纯的看 Laravel 手册的时候会有一些疑惑,比如说系统服务下的授权和事件,这些功能服务的应用场景是什么,其实如果没有经历过一定的开发经验有这些疑惑是很正常的事情,但是当我们在工作中多加思考会发现有时候这些服务其实我们一直都见过。下面就事件、事件监听举一个很简单的例子你就会发现。 这个例子是关于文章的浏览数的实现,...
-
1、点击元素,获取绑定该事件的父级元素,使用 e.currentTarget。e.target 获取的是,出发该事件的元素,该元素有可能是所绑定事件的元素的子元素。 2、使用 react router4 history 只能传递给儿子组件,不能传递给孙子组件 如果孙子组件需要,可以通过 props 传递过去 3、关...
-
1. preventDefault: 比如百度,这是html中最基础的东西,起的作用就是点击百度链接到http://www.baidu.com,这是属于标签的默认行为;preventDefault方法就是可以阻止它的默认行为的发生而发生其他的事情;...
-
Vue组件使用v-on绑定自定义事件: 可以分为3步理解: 1.在组件模板中按照正常事件机制绑定事件: template: '', 如上,v-on:click就是用来给子组件绑定点击事件的,这就...
-
文章目录1. 解决问题2. 应用场景3. 实现方式C++实现C语言实现4. 缺点5. 和其他三种创建模式的对比(单例,工厂,建造者) 1. 解决问题 如果对象的创建成本较大,而同一个类的不同对象之间的差别不大(大部分字段相同),在这种情况下,我们可以利用已有对象(原型)进行赋值(拷贝)的方式,创建新的对象,从而达到节省对象创...
-
混合osd的部署 先部署所有的ssd 在/etc/ceph.conf中最后添加ssd做osd的block大小如下: 比如部署中有两个ssd,则添加 [osd.0] bluestore_block_size = xxxx [osd.1] bluestore_block_size = xxx 如上的size大小计算如下,如ssd容量...
-
文章目录Pool创建ec pool创建副本pool创建Pool参数创建根故障域及添加osd其他命令Tier相关 Pool创建 ec pool创建 创建profile ceph osd erasure-code-profile set $profile_name k=$k m=$m crush-failure-domain...
-
文章目录简介使用OSD相关操作PG相关操作对象相关操作总结 简介 ceph-objectstore-tool工具,能够操作到ceph最底层的数据,包括pg,对象层级。它能够对底层pg以及对象相关数据进行获取、修改。并能够对一些问题pg和对象进行简单修复。所以使用该工具进行操作的时候需要谨慎(涉及到修改的操作最好备份一份数据)...
-
文章目录ceph版本:环境配置:异常问题:问题解决:总结 ceph版本: ceph 12.2.1 环境配置: tier_pool 16个分区大小800G 的osd容量 3副本 data_pool 32个4T盘 3副本 异常问题: ps:在分布式存储中遇到任何问题都不要先去通过重设存储节点,清除磁盘数据来解决,一定要...