运行ORB-SLAM笔记_编译篇(一)
2.打开后如下
就好像是用一件新产品一样,我们首先要看一下说明书“README.md”,
README.md介绍了很多关于这个工程的东西,比如作者,发表的论文,研究的人员,代码的下载以及更新
那么我们首先从有用的信息开始操作:(备注:以下内容都是我的个人理解,都是别人的东西,我拿来学习而已)
3.解决依赖项
3.1 Boost :用这个Boost库在SLAM运行过程中开辟不同的线程
3.2 ROS:使用ROS采集摄像头或者记录下来的视频(rosbag)的图像信息,进行可视化
我的电脑安装的是indigo版本的所以安装教程是:wiki.ros.org/indigo/Installation/Ubuntu
安装完成运行 roscore 出现如下界面说明安装成功,同时也就可以学习ROS的基本教程了
wiki.ros.org/ROS/Tutorials

3.3 OpenCV 使用OpenCV去处理图像特征,ORB-SLAM的OpenCV版本是OpenCV 2.4,下载和安装OpenCV
http://opencv.org/ 或者任意百度一下都有好多教程。
3.4 g20(第三方库) 这里用的是修改后的G2O版本,那么原始代码在 https://github.com/RainerKuemmerle/g2o ,G2O即是通用图优化,g2o是一个算法集的C++实现,根据前人求解非线性最小二乘的理论,根据具体的问题,选用最合适的算法,
为了能够编译G2O,需要安装一些东东是:BLAS, LAPACK and Eigen3,直接命令:
sudo apt-get install libblas-dev
sudo apt-get install liblapack-dev
sudo apt-get install libeigen3-dev
3.5 DBow2(第三方库)DBow2是一种高效的回环检测算法,DBOW2算法的全称为Bags of binary words for fast place recognition in image sequence,使用的特征检测算法为Fast,描述子使用的是brief描述子,是一种离线的方法。使用了DBow2和DLib库的一些算法,进行位置识别和特征匹配,不需要为它添加其他依赖项(代码地址: https://github.com/dorian3d/DBoW2)
4.安装
4.1 确认已经安装了ROS以及他的依赖项 (boost, eigen3, opencv, blas, lapack).
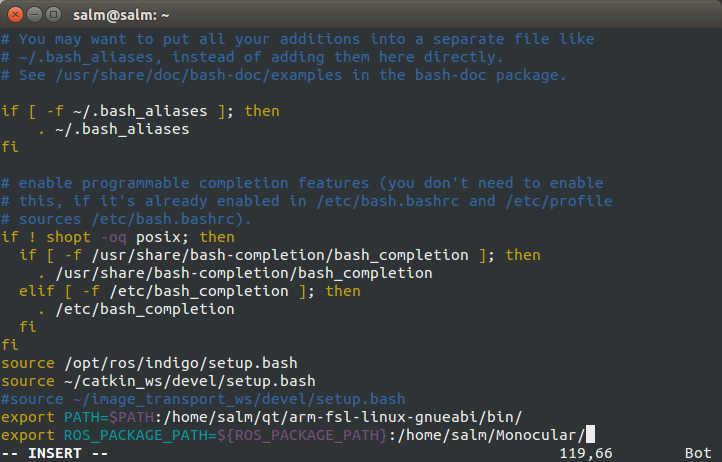
添加所下在的ORB-SLAM的路径到环境变量下,比如我的ORB-SLAM的路径为:
所以需要打开配置ubuntu环境变量的~/.bashrc文件,在文件最底处添加如图所示的命令行:然后source ~/.bashrc.
4.2 build g2o 安照说明一步一步来
前往 /home/salm/Monocular/ORB_SLAM/Thirdparty/g2o ;
依次命令为: cd ~/Monocular/ORB_SLAM/Thirdparty/g2o
mkdir build
cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make
g2o编译成功。
4.3 Buid DB0W2 与编译g2o时相似命令如下
cd ~/Monocular/ORB_SLAM/Thirdparty/DBoW2
mkdir build
cd build
cmake .. -DROS_BUILD_TYPE=Release
make
4.4 Build ORB-SLAM,这里有一个提示**If you use ROS Indigo, remove the depency of opencv2 in the manifest.xml.**
(按照理解就是把manifest.xml中的opencv2注释就好了呗),如下图:

然后就按照步骤来执行,
更改之后就可以进入编译:
cd ~/Monocular/ORB_SLAM
mkdir build
cd build
cmake .. -DROS_BUILD_TYPE=Release
make
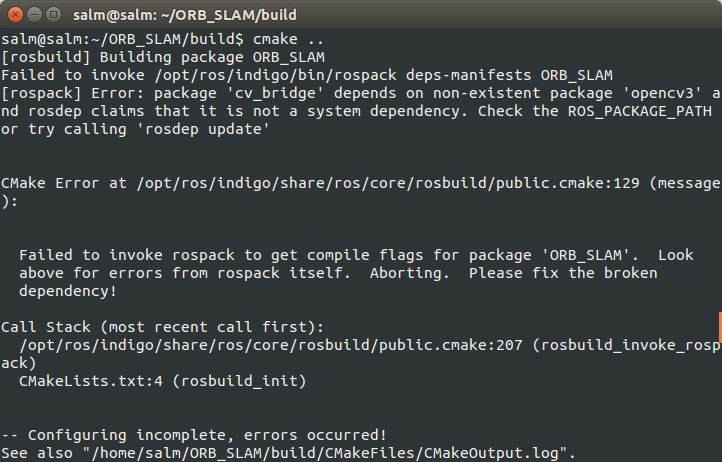
但是在执行到cmake .. -DROS_BUILD_TYPE=Release发现会有错误,
然后就开始百度搜索答案呗,我也是这样想的,就会看到此博客 http://blog.csdn.net/wishchin/article/details/50468950
就会提示说路径设置有问题,然后我就各种设置,每设置一次就编译一次,只记得用了好长时间,都没有成功,过了一段时间
想想 我应该把这三个都注释掉就有
如下图然后执行cmake .. -DROS_BUILD_TYPE=Release这样虽然生成了Makefile,但是在接下来的make肯定会出错的,因为我们把所有关于opencv的依赖项都给注释了
所以就导致编译出错了(但是这里可以我也没找到什么原因,为什么我按照说明书,却行不通,我怀疑是我的opencv没有安装好,或者路径设置不对,但是这些都不管了,我知道我已经安装了opencv)
(注释了三个依赖项然后make 的结果如下图)
可能也会出现其他错误,提示找不到opnecv的库函数,或者说找不cv_bridge等函数

所以我就按照网上找各种方案的就结合我就只是把manifest.xml文件注释了OPENCV2,进去到ORB_SALM文件下:

执行:
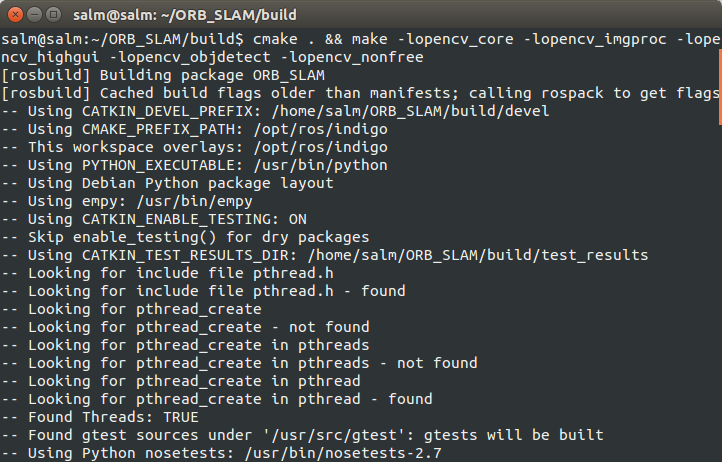
后面是我手动添加的opencv的链接库,
cmake .. && make -lopencv_core -lopencv_imgproc -lopencv_highgui -lopencv_objdetect -lopencv_nonfree
如下图,
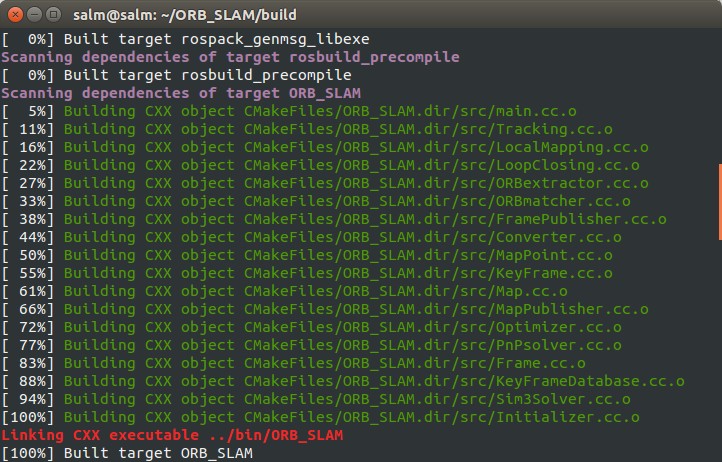
(也就是说在我的电脑上(ubuntu14.04 32位 ros_indigo)在camke 和make 都需要添加opencv 的链接库,编译成功了)
因为创建了两个工作空间导致我的程序又出错误了,之前运行
rosrun ORB_SLAM ORB_SLAM /home/salm/ORB_SLAM/Data/ORBvoc.txt /home/salm/ORB_SLAM/Data/Settings.yaml
rosrun ORB_SLAM ORB_SLAM ~/ORB_SLAM/Data/ORBvoc.txt ~/ORB_SLAM/Data/Settings.yaml
都是可以运行的,不知道为啥又出现错误了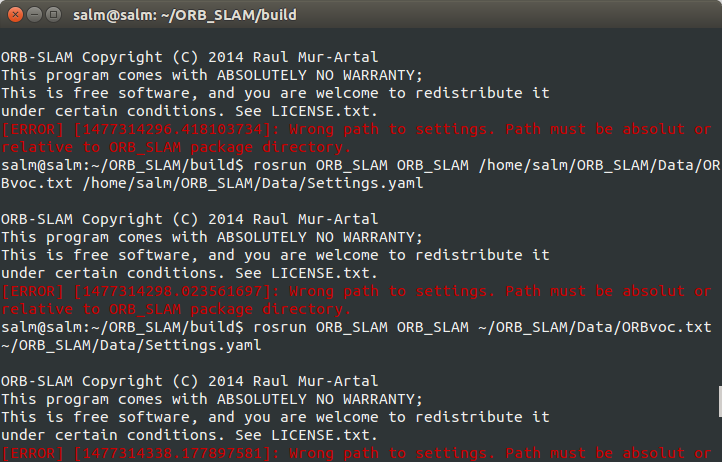
就是很不知怎么回事说我的路径有问题
后来我运行
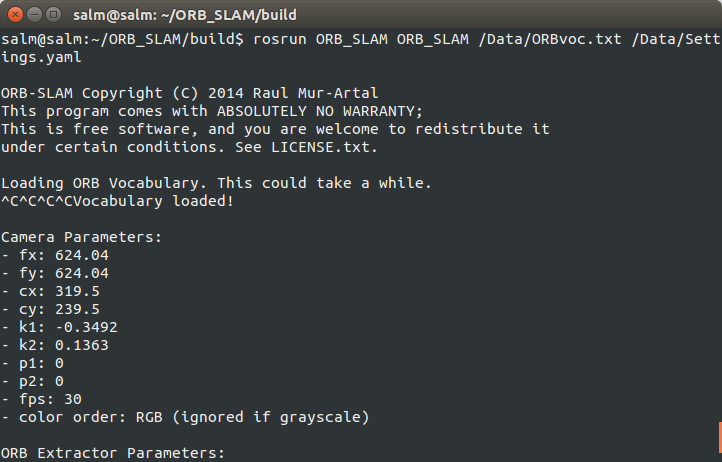
rosrun ORB_SLAM ORB_SLAM /Data/ORBvoc.txt /Data/Settings.yaml
(不是绝对路径,而是在ORB_SLAM路径下的绝对路径)就可以运行了
以下是我在整理问题是所遇到的有关的网页
askubuntu.com/questions/510606/error-adding-symbols-dso-missing-from-command-line
blog.csdn.net/dreamer_lhs/article/details/51297432
www.voidcn.com/blog/wishchin/article/p-4970975.html
blog.csdn.net/real_myth/article/details/51798557
blog.csdn.net/dourenyin/article/details/48055441
更多相关:
-
公众号致力于分享点云处理,SLAM,三维视觉,高精地图相关的文章与技术,欢迎各位加入我们,一起每交流一起进步,有兴趣的可联系微信:920177957。本文来自点云PCL博主的分享,未经作者允许请勿转载,欢迎各位同学积极分享和交流。资源三维点云论文及相关应用分享【点云论文速读】基于激光雷达的里程计及3D点云地图中的定位方法3D目标检测...
-
Thanks to LOAM, A-LOAM, and LIO-SAM code authors. The major codes in this repository are borrowed from their efforts.代码:https://github.com/gisbi-kim/SC-A-LOAM编译:点云PCL本...
-
文章:Inertial-Only Optimization for Visual-Inertial Initialization作者:Carlos Campos, Jose M.M. Montiel and Juan D. Tard ´ os´代码:https://github.com/bxh1/VIDO-SLAM.git编译:点云...
-
点云PCL免费知识星球,点云论文速读。文章:Monocular Object and Plane SLAM in Structured Environments作者:Shichao Yang, Sebastian Scherer翻译:particle本文仅做学术分享,如有侵权,请联系删除。欢迎各位加入免费知识星球,获取PDF论文,欢...
-
点云PCL免费知识星球,点云论文速读。文章:Persistent Map Saving for Visual Localization for Autonomous Vehicles: An ORB-SLAM 2 Extension作者:Felix Nobis∗, Odysseas Papanikolaou, Johannes Be...
-
大牛们应该对路径都很了解了,这篇文章主要给像我这样的入门小白普及常识用的,啊哈下面的路径介绍针对windows,其他平台的暂时不是很了解。在编写的py文件中打开文件的时候经常见到下面其中路径的表达方式:open('aaa.txt')open('/data/bbb.txt')open('D:\user\ccc.txt')这三种表达式...
-
1)绝对路径:绝对路径是指目录下的绝对位置,直接到达目标位置,通常是从盘符开始的路径。例如:C:windowssystem32cmd.exe 注意: 在不同系统的情况系 windows下是“”,linux和unix下是“/” ,但在win中没有本质区别。linux和unix系统中绝对路径 以“/”为起始 例:/home/us...
-
最终运行效果 当然,这个Application context路径可以直接删掉不需要最终访问路径就会变成http://localhost:8080/...
-
1、在js代码里面 或者 html里面用"v-bind:"或":属性名"绑定路径的时候使用 require('@/assets/home/imgName.png') 2、在css或者scss或者html里面的src中引入图片使用(注意如果是:src=后面用第1种方式引入路径) ~@/assets/components...
-
寻路算法大总结! 交换机生成树采用的是完全不同的D-V(distance vector)距离矢量算法,并不是很可靠. 并不是任意两点之间的最短路径,因为任意两点之间取最短路径可能有环路:总权更大 交换机STP不一定是最小生成树!!!举例论证 因为它只是所有交换机到根桥最短 贪心算法的味...