采样频率:
采样频率·是指1s内采样的次数,反映了采样点之间的间隔大小。
采样频率越高,得到的图像样本越逼真,图像质量越高,但要求的存储量也越大。

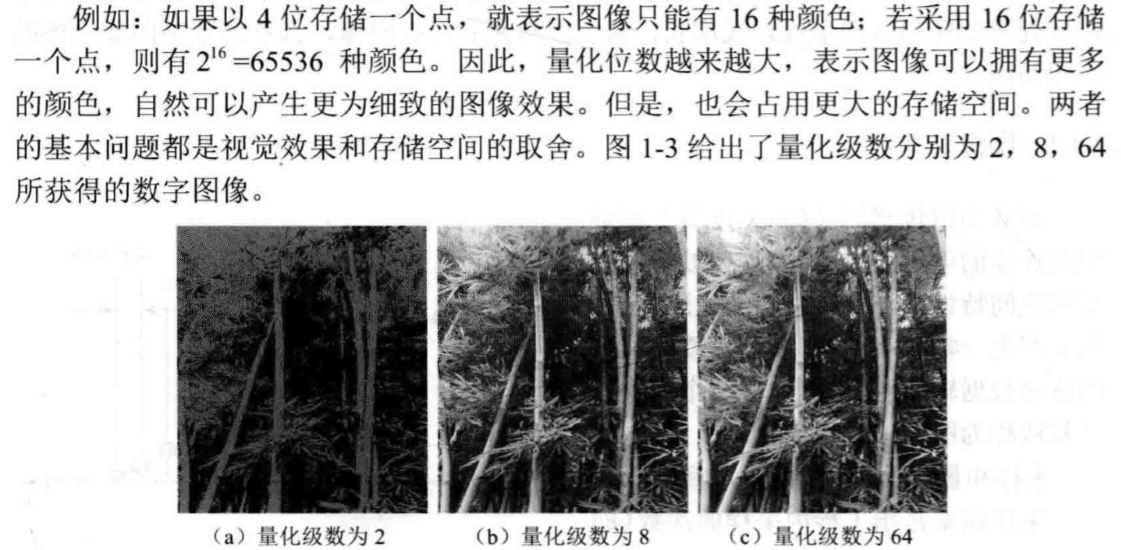
图像量化:
要用多大范围的数值来表示图样采样之后的每一个点。量化的结果是图像能够容纳的颜色总数,它反映了采样的质量。
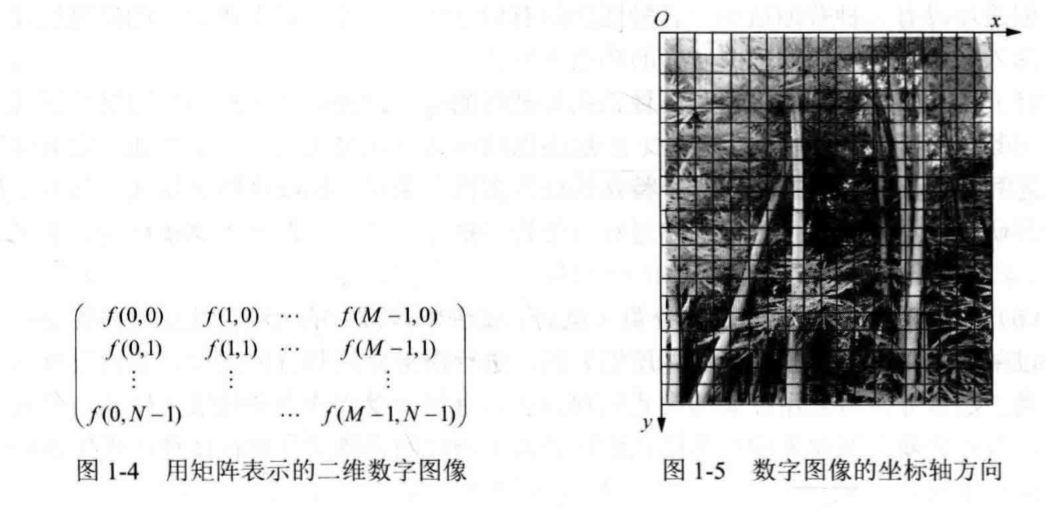
图像的扫描方式:
一般情况下,数字图像的原点位于左上角。数字图像的扫描方式是从左上角开始向右扫描,扫描完一行后转到下一行的最左侧开始扫描,一直到达图像的右下角,
即x坐标轴方向为自左向右,y坐标轴方向为自上到下。
像素灰度直接转换;
8比特的像素可以分辨出2^8即256个渐变的灰度,
12比特的像素可以分辨出2^12即4096个渐变的灰度.
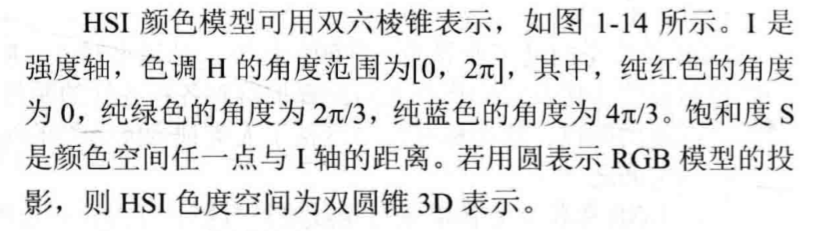
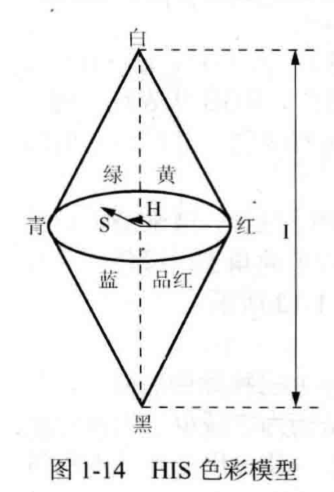
色彩空间