【开源分享】VIDO-SLAM:一种视觉惯性动态物体SLAM系统
文章:Inertial-Only Optimization for Visual-Inertial Initialization
作者:Carlos Campos, Jose M.M. Montiel and Juan D. Tard ´ os´
代码:https://github.com/bxh1/VIDO-SLAM.git
编译:点云PCL
本文仅做学术分享,如有侵权,请联系删除。欢迎各位加入免费知识星球,获取PDF论文,欢迎转发朋友圈。内容如有错误欢迎评论留言,未经允许请勿转载!
公众号致力于分享点云处理,SLAM,三维视觉,高精地图相关的文章与技术,欢迎各位加入我们,一起每交流一起进步,有兴趣的可联系微信:920177957。本文来自点云PCL博主的分享,未经作者允许请勿转载,欢迎各位同学积极分享和交流。
摘要
VIDO-SLAM是一种视觉惯性动态物体SLAM系统,能够估计相机姿态,使用单目相机进行视觉惯性SLAM,跟踪动态物体,算法无论是否使用IMU,都可以提供了使用单目相机在Kaist数据集中运行SLAM系统。
历史文章:【开源分享】VDO-SLAM:基于视觉的动态SLAM感知系统
实现了功能包括:
(1)将MonoDepth2、FlowNet和MaskRcnn与可在基于ROS的SLAM系统中实时运行
(2)实现了室外场景中的视觉惯导SLAM
(3)跟踪和估计动态对象的运动

主要内容及贡献
这篇文章在视觉惯导SLAM初始化中的工作的主要贡献有:
(1)考虑IMU噪声的概率模型的情况下,将视觉-惯性初始化问题表述为只考虑惯的最优估计问题。
(2)一次性求解了所有的惯性参数,避免了解耦估计所产生的不一致性,这使得所有的估计都是一致。
(3)不做任何初始速度和姿态的假设,这使得该方法适用于任何初始情况。
(4)不假设IMU偏差为零,且将它们的已知信息编码为被我们的MAP估计所利用的概率先验。
根据不同传感器初始化方法可以分为三个步骤:
仅视觉的最大后验估计:使用BA初始化并运行短时间的单目ORB-SLAM,以获得一个纯视觉MAP估算的 up-to-scale,同时,计算关键帧间的IMU预积分及其协方差。
仅惯导的最大后验估计:仅针对惯性的优化,使IMU轨迹与ORB-SLAM轨迹对齐,找到尺度,关键帧的速度、重力方向和IMU偏差 biases。
视觉-惯导的联合最大后验:将上一步的解作为完整VI-BA的种子,得到联合最优解。
具体细节可查看原文:
https://arxiv.org/pdf/2003.05766.pdf
实验
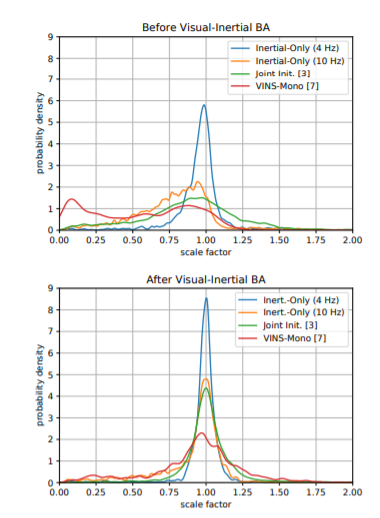
下表展示了EuRoC数据集中每0.5s进行一次初始化的结果统计:

视觉惯性BA前后,通过不同初始化方法沿EuRoC数据集的所有序列获得的比例因子(估计和真值比例之间的比率)的实验分布,总共启动了2248次初始化。如下图:
与原始ORBSLAM-VI和VINS Mono的比较结果。

代码依赖:
ROS
PyTorch (Version: 1.4.0)
GPU (at least 8GB of memory)
OpenCV
Pangolin
g2o
Eigen
相关文章:
Jun Zhang, Mina Henein, Robert Mahony and Viorela Ila. VDO-SLAM: A Visual Dynamic Object-aware SLAM System. Submitted to The International Journal of Robotics Research. IJRR (Under Review).
Carlos Campos, J. M. M. Montiel and Juan D. Tardós, Inertial-Only Optimization for Visual-Inertial Initialization, ICRA 2020.
总结
所提出的初始化方法比大多文献中的方法更精确,计算时间非常短,这证实了最优估计理论能够正确利用传感器噪声的概率模型,获得比求解线性方程组或使用非加权最小二乘法更精确的结果。
资源
三维点云论文及相关应用分享
【点云论文速读】基于激光雷达的里程计及3D点云地图中的定位方法
3D目标检测:MV3D-Net
三维点云分割综述(上)
3D-MiniNet: 从点云中学习2D表示以实现快速有效的3D LIDAR语义分割(2020)
win下使用QT添加VTK插件实现点云可视化GUI
JSNet:3D点云的联合实例和语义分割
大场景三维点云的语义分割综述
PCL中outofcore模块---基于核外八叉树的大规模点云的显示
基于局部凹凸性进行目标分割
基于三维卷积神经网络的点云标记
点云的超体素(SuperVoxel)
基于超点图的大规模点云分割
更多文章可查看:点云学习历史文章大汇总
SLAM及AR相关分享
【开源方案共享】ORB-SLAM3开源啦!
【论文速读】AVP-SLAM:自动泊车系统中的语义SLAM
【点云论文速读】StructSLAM:结构化线特征SLAM
SLAM和AR综述
常用的3D深度相机
AR设备单目视觉惯导SLAM算法综述与评价
SLAM综述(4)激光与视觉融合SLAM
Kimera实时重建的语义SLAM系统
SLAM综述(3)-视觉与惯导,视觉与深度学习SLAM
易扩展的SLAM框架-OpenVSLAM
高翔:非结构化道路激光SLAM中的挑战
SLAM综述之Lidar SLAM
基于鱼眼相机的SLAM方法介绍
如果你对本文感兴趣,请后台发送“知识星球”获取二维码,务必按照“姓名+学校/公司+研究方向”备注加入免费知识星球,免费下载pdf文档,和更多热爱分享的小伙伴一起交流吧!
以上内容如有错误请留言评论,欢迎指正交流。如有侵权,请联系删除
扫描二维码
关注我们
让我们一起分享一起学习吧!期待有想法,乐于分享的小伙伴加入免费星球注入爱分享的新鲜活力。分享的主题包含但不限于三维视觉,点云,高精地图,自动驾驶,以及机器人等相关的领域。
分享及合作方式:微信“920177957”(需要按要求备注) 联系邮箱:[email protected],欢迎企业来联系公众号展开合作。
点一下“在看”你会更好看耶

更多相关:
-
公众号致力于分享点云处理,SLAM,三维视觉,高精地图相关的文章与技术,欢迎各位加入我们,一起每交流一起进步,有兴趣的可联系微信:920177957。本文来自点云PCL博主的分享,未经作者允许请勿转载,欢迎各位同学积极分享和交流。资源三维点云论文及相关应用分享【点云论文速读】基于激光雷达的里程计及3D点云地图中的定位方法3D目标检测...
-
Thanks to LOAM, A-LOAM, and LIO-SAM code authors. The major codes in this repository are borrowed from their efforts.代码:https://github.com/gisbi-kim/SC-A-LOAM编译:点云PCL本...
-
点云PCL免费知识星球,点云论文速读。文章:Monocular Object and Plane SLAM in Structured Environments作者:Shichao Yang, Sebastian Scherer翻译:particle本文仅做学术分享,如有侵权,请联系删除。欢迎各位加入免费知识星球,获取PDF论文,欢...
-
点云PCL免费知识星球,点云论文速读。文章:Persistent Map Saving for Visual Localization for Autonomous Vehicles: An ORB-SLAM 2 Extension作者:Felix Nobis∗, Odysseas Papanikolaou, Johannes Be...
-
点云PCL免费知识星球,点云论文速读。标题:三维点云分割综述(上)排版:particle欢迎各位加入免费知识星球,获取PDF文档,欢迎转发朋友圈,分享快乐。这是一篇综述性论文,以下只做概述性介绍,介绍文章已共享在微信群和免费知识星球中,文章在公众号将分成三个部分:第一部分介绍点云的获取以及各种传感器获取点云的特性,以及分割概念的区别...
-
点云PCL免费知识星球,点云论文速读。文章:DLL: Direct LIDAR Localization. A map-based localization approach for aerial robots作者:Fernando Caballero1 and Luis Merino编译:点云PCL代码:https://githu...
-
CloudCompare是一个三维点云(网格)编辑和处理软件。最初,它被设计用来对稠密的三维点云进行直接比较。它依赖于一种特定的八叉树结构,在进行点云对比这类任务时具有出色的性能【1】。此外,由于大多数点云都是由地面激光扫描仪采集的,CloudCompare的目的是在一台标准笔记本电脑上处理大规模的点云——通常超过1000万个点云。...
-
点云PCL免费知识星球,点云论文速读。文章:Open3DGen: Open-Source Software for Reconstructing Textured 3D Models from RGB-D Images作者:Teo T. Niemirepo, Marko Viitanen, and Jarno Vanne编译:点云P...
-
点云PCL免费知识星球,点云论文速读。标题:Real-Time Spatio-Temporal LiDAR Point Cloud Compression作者:Yu Feng , Shaoshan Liu , and Yuhao Zhu来源:2020IROS本文仅做学术分享,如有侵权,请联系删除。欢迎各位加入免费知识星球,获取PDF...