SSC:基于点云语义上下文的大规模激光SLAM的位置识别方法
文章:SSC: Semantic Scan Context for Large-Scale Place Recognition
作者:Lin Li1 , Xin Kong1 , Xiangrui Zhao1 , Tianxin Huang1 and Yong Liu1
编译:点云PCL
本文仅做学术分享,如有侵权,请联系删除。欢迎各位加入免费知识星球,获取PDF论文,欢迎转发朋友圈。内容如有错误欢迎评论留言,未经允许请勿转载!
公众号致力于分享点云处理,SLAM,三维视觉,高精地图相关的文章与技术,欢迎各位加入我们,一起每交流一起进步,有兴趣的可联系微信:920177957。本文来自点云PCL博主的分享,未经作者允许请勿转载,欢迎各位同学积极分享和交流。
摘要
位置识别使SLAM系统具有纠正累积错误的能力,与包含丰富纹理特征的图像不同,点云几乎是纯几何信息,这使得基于点云的位置识别具有挑战性。现有的作品通常将坐标、法线、反射强度等低层特征编码为局部或全局的描述子来表示场景,此外,在匹配描述子时,往往忽略了点云之间的转换,与现有的大多数方法不同,本文探索了使用高级特征(即语义信息)来提高描述子的表示能力,另外,在匹配描述子时,我们尝试校正点云之间的平移以提高精度,具体地说,本文提出了一个新的全局描述子,点云语义上下文信息,它可以更有效地挖掘语义信息来表示场景,本文还提出了一种两步全局语义ICP算法来获得三维姿态(x,y,yaw),用于点云的对齐以提高匹配性能,我们在KITTI数据集上的实验表明,我们的方法比现有的方法有很大的优势。
代码开源:https://github.com/lilin-hitcrt/SSC.

图1:使用点云语义上下文的位置识别的示例,这是KITTI数据集08的局部建图实例,其中第720帧和1500帧形成回环,图的下半部分是两帧对应的点云语义上下文,由于它们的方向是相反的,因此描述子是完全不同的。
介绍
本文提出了一种新的全局描述子-点云语义扫描上下文(SSC),它利用语义信息来增强描述子的表达能力,我们还提出了一种两步全局语义ICP算法,该算法可以在不考虑姿态初始化的情况下产生鲁棒的结果,从而获得点云的三维姿态(x,y,yaw),然后利用姿态来对齐点云,以减少旋转和平移对描述子相似性的影响。此外,它还可以为六自由度icp算法提供良好的初始值,进一步优化全局姿态,图1展示了我们的结果。主要贡献总结如下:
•提出了一种新的基于激光雷达的位置识别全局描述子,利用语义信息对三维场景进行有效编码。
•提出了一种不需要任何初始值的两步全局语义ICP来获取点云的三维姿态(x,y,yaw)。
•将点云与获得的三维姿态对齐,以消除旋转和平移误差对描述子相似性的影响,这将作为较好的初始位姿进一步优化SLAM系统。
•在KITTI数据集上的详尽实验表明,我们的方法实现了最先进的位置识别和姿态估计性能。
主要内容
在本节中,将介绍我们的基于点云语义上下文信息的方法,与其他基于扫描上下文的方法使用不完全语义信息和忽略点云之间的小平移不同,我们探索了充分利用点云之间的语义信息,强调点云对之间的小平移对识别的准确性有重要影响。
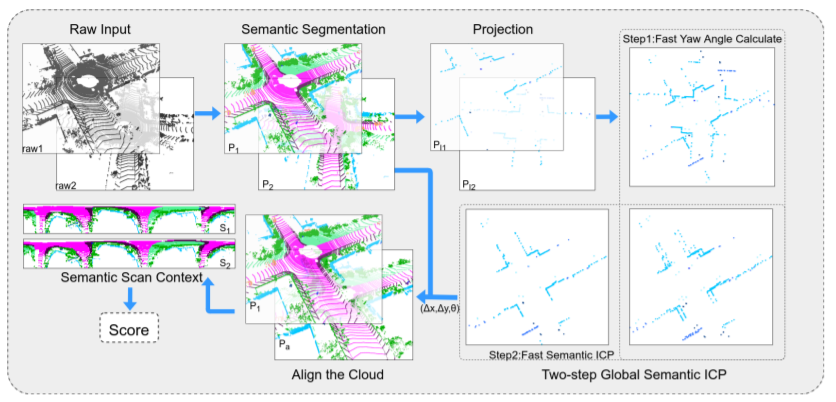
图2 方法流程,它主要由两部分组成:两步全局语义ICP和点云语义上下文信息
A.全局语义信息ICP
众所周知,基于局部迭代优化的通用ICP算法易受局部极小值的影响,对于位置识别,通常无法得到一个有效的初始值,这导致了常规ICP算法的失效,为了解决这个问题,我们提出了由快速偏航角计算和快速语义ICP组成的两步全局语义ICP算法,由于使用了语义信息,我们的算法不需要任何初始值就可以得到满意的结果。
所谓的快速计算偏航角方法就是基于点云语义上下文信息的方法,其描述子的列表示偏航角,激光雷达在水平面上的纯旋转将导致其描述子的列移动,点云上下文和强度扫描上下文同时得到相似度和偏航角,具体地说,它们使用所有可能的列位移描述子计算相似度(或距离),并找到最大相似度(或最小距离),然而,有两个主要缺点。首先,用移位的方法比较整个二维描述子是低效的,其次,他们仍然试图从不同的地方获得点云的最大分数(而不是回环),这显然使它更容易出现假阳性。针对上述问题,本文提出了基于语义的快速偏航角计算方法。与点云上下文和点云强度上下文方法相比,该方法只需要比较一维向量,因此,它的效率更高。此外,该方法不需要通过最大化得分来获得角度,这有助于识别非闭合点云对。图3显示了快速偏航角计算的结果。

图3:两步全局语义ICP的图示
快速语义ICP。虽然大多数的研究忽略了点云之间的平移,但是忽略平移会导致我们的实验结果显著下降。实际上,对于基于扫描点云上下文的方法,转换将同时影响描述子的行和列,单靠列移位描述子是不能得到最佳结果的,因此,提出了一种快速的语义ICP算法来校正点云之间的转换。
B 点云语义上下文
扫描点云上下文和强度扫描上下文分别使用点的高度和反射强度作为特征,他们的方法基本上利用了场景中不同对象的不同特征,然而,高度和反射强度只是物体的低层次特征,不够具有代表性,我们尝试利用高层语义特征来表示场景,并提出了点云语义上下文描述子。

图4:生成SSC的示例。ρ和θ分别表示极径和极角。扇区对应于描述子的列,而环对应于描述子的行。
实验
我们在64环激光雷达的KITTI里程数据集上进行实验,该数据集包含11个具有地面真值姿态的序列。选择环闭合序列(00,02,05,06,07,08)进行评估,并注意到序列08具有反向环,而其他序列则在同一方向。
如图5和表4所示, 我们的SK方法在所有序列的所有指标上都优于其他方法,特别是在序列08中,只有反向回环,其他方法的性能显著下降,而我们的方法仍然表现良好。这表明我们的方法对视角变化具有鲁棒性。

在本实验中,我们改变α的值来分析负样本数对算法的影响,图6显示了不同α对应的平均F1最大分数和平均扩展精度,这清楚地表明,无论采用多少α,我们的方法都比其他方法有更好的性能,随着α的增加,所有方法的性能都逐渐下降,但我们的方法受影响较小,表明我们的方法能够有效地识别阴性样本。

表II显示KITTI数据集上的相对偏航误差。我们可以看到,我们的方法在平均相对偏航误差方面优于其他方法。特别是在具有挑战性的序列08中,由于受到反循环的影响,大多数方法的性能较差,而我们的方法仍然能够准确地估计偏航角。这再次表明我们的方法可以很好地处理反向回环。

图7显示了我们的方法在KITTI数据集上的相对平移误差,如图所示,我们的方法可以估计准确的相对平移,这是目前我们所知的其他方法无法做到的,因此,我们的快速偏航角计算和快速语义ICP方法可以提供准确的三维姿态估计,这为ICP算法获得6D姿态或直接作为SLAM系统的全局约束提供了良好的初始值。

为了评估效率,我们将α设置为1,并将我们的方法的平均时间代价08数据集上的扫描点云上下文和强度扫描上下文进行比较。如表四,由于我们使用得到的三维姿态来提前对齐点云,在匹配阶段不需要移动描述子列,因此我们的检索速度非常快,两步全局语义ICP平均只需要2.126毫秒。

总结
本文提出了一种新的基于语义的位置识别全局描述子,提出了一种两步全局语义ICP算法来获取点云对的3D姿态(x,y,yaw),通过对齐点云来提高描述子匹配精度,此外,该方法可以为点云配准提供良好的初始值,与最先进的方法相比,我们在KITTI里程计数据集上取得了领先的性能。
如果你对本文感兴趣,请后台发送“知识星球”获取二维码,务必按照“姓名+学校/公司+研究方向”备注加入免费知识星球,免费下载pdf文档,和更多热爱分享的小伙伴一起交流吧!
以上内容如有错误请留言评论,欢迎指正交流。如有侵权,请联系删除
扫描二维码
关注我们
让我们一起分享一起学习吧!期待有想法,乐于分享的小伙伴加入免费星球注入爱分享的新鲜活力。分享的主题包含但不限于三维视觉,点云,高精地图,自动驾驶,以及机器人等相关的领域。
分享及合作方式:微信“920177957”(需要按要求备注) 联系邮箱:[email protected],欢迎企业来联系公众号展开合作。
点一下“在看”你会更好看耶

更多相关:
-
来源:公众号|计算机视觉工坊(系投稿)作者:仲夏夜之星「3D视觉工坊」技术交流群已经成立,目前大约有12000人,方向主要涉及3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、学术交流、...
-
点云PCL免费知识星球,点云论文速读。文章:Real-Time LIDAR-Based Urban Road and Sidewalk Detection for Autonomous Vehicles作者:Ern˝o Horváth , Claudiu Pozna ,and Miklós Unger编译:点云PCL代码:http...
-
文章:Semantic Histogram Based Graph Matching for Real-Time Multi-Robot Global Localization in Large Scale Environment作者:Xiyue Guo, Junjie Hu, Junfeng Chen, Fuqin Deng, T...
-
点云PCL免费知识星球,点云论文速读。文章:Robust Place Recognition using an Imaging Lidar作者:Tixiao Shan, Brendan Englot, Fabio Duarte, Carlo Ratti, and Daniela Rus编译:点云PCL(ICRA 2021)开源代码:...
-
文章:A Survey of Calibration Methods for Optical See-Through Head-Mounted Displays作者:Jens Grubert , Yuta Itoh, Kenneth Moser编译:点云PCL本文仅做学术分享,如有侵权,请联系删除。欢迎各位加入免费知识星球,获取PD...
-
英语的重要性,毋庸置疑!尤其对广大职场人士,掌握英语意味着就多了一项竞争的技能。那,对于我们成人来说,时间是最宝贵的。如何短时间内在英语方面有所突破,这是我们最关心的事情。英语学习,到底有没有捷径可以走,是否可以速成?周老师在这里明确告诉大家,英语学习,没有绝对的捷径走,但是可以少走弯路。十多年的教学经验告诉我们,成功的学习方法可以借...
-
展开全部 其实IDLE提供了一个显32313133353236313431303231363533e78988e69d8331333365663438示所有行和所有字符的功能。 我们打开IDLE shell或者IDLE编辑器,可以看到左下角有个Ln和Col,事实上,Ln是当前光标所在行,Col是当前光标所在列。 我们如果想得到文件代码...
-
前言[1]从 Main 方法说起[2]走进 Tomcat 内部[3]总结[4]《Java 2019 超神之路》《Dubbo 实现原理与源码解析 —— 精品合集》《Spring 实现原理与源码解析 —— 精品合集》《MyBatis 实现原理与源码解析 —— 精品合集》《Spring MVC 实现原理与源码解析 —— 精品合集》《Spri...
-
【本文摘要】【注】本文所述内容为学习Yjango《学习观》相关视频之后的总结,观点归Yjango所有,本文仅作为学习之用。阅读本节,会让你对英语这类运动类知识的学习豁然开朗,你会知道英语学习方面,我们的症结所在。学习英语这类运动类知识,需要把握四个原则第一,不要用主动意识。第二,关注于端对端第三,输入输出符合实际情况第四,通过多个例子...
-
点云PCL免费知识星球,点云论文速读。文章:RGB-D SLAM with Structural Regularities作者:Yanyan Li , Raza Yunus , Nikolas Brasch , Nassir Navab and Federico Tombari编译:点云PCL代码:https://github.co...
-
点云PCL免费知识星球,点云论文速读。标题:Probabilistic Semantic Mapping for Urban Autonomous Driving Applications作者:David Paz, Hengyuan Zhang, Qinru Li星球ID:particle欢迎各位加入免费知识星球,获取PDF论文,欢...
-
Kimera实时重建的语义SLAM系统 Kimera是C++实现的一个具有实时度量的语义SLAM系统,使用的传感器有相机与IMU惯导数据来构建环境语义标注的3D网格,Kinera支持ROS运行在CPU上的高效模块化的开源方案。包含了四个模块: 快速准确的视觉-惯导里程计VIO流水线(Kimera-VIO) 基于鲁棒位姿的图优化完整S...