1.验证旋转矩阵是正交矩阵
感觉下面这篇博客写的不错
http://www.cnblogs.com/caster99/p/4703033.html
总结一下:旋转矩阵是一个完美的矩阵——正交矩阵。①行列式为1,②每个列向量都是单位向量且相互正交,③它的逆等于它的转置。
2.罗德里格斯公式的简单推导
http://blog.sina.com.cn/s/blog_ea828d2a0102wlk6.html
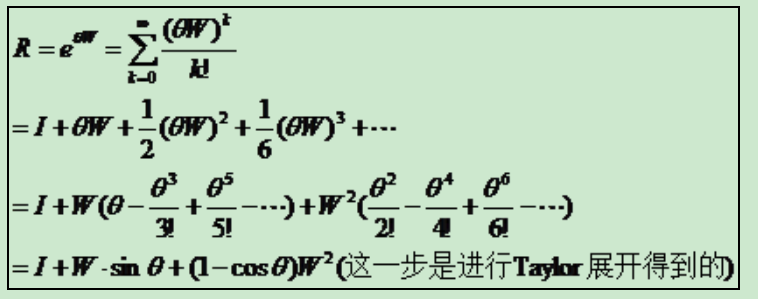
罗德里格斯旋转公式是通过反对称矩阵求旋转矩阵的方法,起初我在看别人写的姿态解算分析文章里看到,他的推导如下:
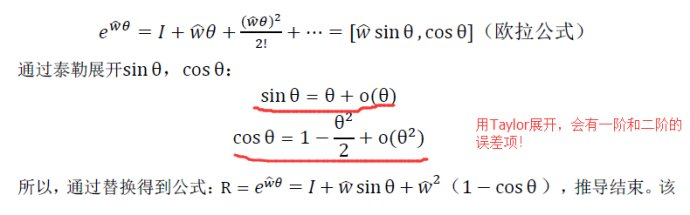
请注意我做标记的地方,我刚开始一直不明白这种推导,这样会有误差的推导,难道罗德里格斯公式是对旋转矩阵R的近似?这样做并不好,反而会使解算的姿态更不准确,后来在群里讨论这个问题,有大神给我解惑了。
首先我们明白这是一个SO(3)到SO(3)的李群的映射。不要担心自己不知道李群是什么,因为我们下面的推导会非常简单!
我们先来看什么是反对称矩阵,在这之前,先展示它和向量叉乘(内积)的关系:

红色三个格子应该是i j k
下面看看我们的反对称矩阵运算:
加一个小三角,就是将这个向量变成一个反对称矩阵
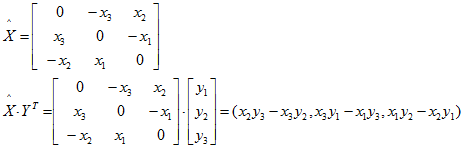
所以我们得出:
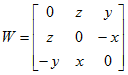
我们知道我们的旋转矩阵R和我们的三角函数的关系,这里就不多说了,所以现在我们来看一个反对称矩阵的性质,首先定义一个反对称矩阵:
同时我们有如下的约束:
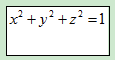
现在我们可以看到我们的反对称阵有如下性质:

现在可以进行我们的罗德里格斯公式推导了:
3. 验证四元数旋转某个点后,结果是一个虚四元数(实部为零),所以仍然对应 到一个三维空间点(式 3.34)。
=.= 看我干啥?下一题
4.旋转矩阵 轴角 欧拉角 四元数
书上都有
P42 轴角[n,α]与旋转矩阵的关系
P52 轴角[n,α]与四元数的关系
欧拉角存在gimbal lock,不研究他的关系【其实我不会】
5.假设有一个大的eigen矩阵,想把他的左上角的3*3取出来,然后赋值为I3x3
6.Ax = b的Eigen实现
7.
机器人一号和二号,分别在世界坐标系中。
一号的位姿q1=[0.35,0.2,0.3,0.1], t1=[0.3,0.1,0.1]T。
二号的位姿q2=[−0.5,0.4,−0.1,0.2], t2=[−0.1,0.5,0.3]T。
q的第一项是实部,且还未归一化。
已知一号机器人看到某个点,在他的坐标系下是p=[0.5,0,0.2]T, 求在二号机器人坐标系下该点的位置。
#include#include // Eigen 部分 #include // 稠密矩阵的代数运算(逆,特征值等) #include //Eigen 几何模块 #include using namespace std;int main(int argc, char **argv) {Eigen::Quaterniond q1(0.35, 0.2, 0.3, 0.1);Eigen::Quaterniond q2(-0.5, 0.4, -0.1, 0.2);Eigen::Vector3d t1(0.3, 0.1, 0.1);Eigen::Vector3d t2(-0.1, 0.5, 0.3);Eigen::Vector3d p1(0.5, 0, 0.2);Eigen::Quaterniond q1_one = q1.normalized();Eigen::Quaterniond q2_one = q2.normalized();//way1 Eigen::Vector3d v = q1_one.inverse() * (p1 - t1);Eigen::Vector3d v2 = q2_one * v + t2;cout << "way1 v2 = " << endl << v2 << endl;//way2 Eigen::Matrix3d R1 = Eigen::Matrix3d(q1_one);Eigen::Matrix3d R2 = Eigen::Matrix3d(q2_one);Eigen::Vector3d v_2 = R1.inverse() * (p1 - t1);Eigen::Vector3d v_2_2 = R2 * v_2 + t2;cout << "way2 v2= " << endl << v_2_2 << endl;return 0; }
way1 v2 = -0.03097310.734990.296108
way2 v2= -0.03097310.734990.296108 *** Exited normally ***